 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoxel Transformer for 3D Object Detection
Paper and Code
Sep 13, 2021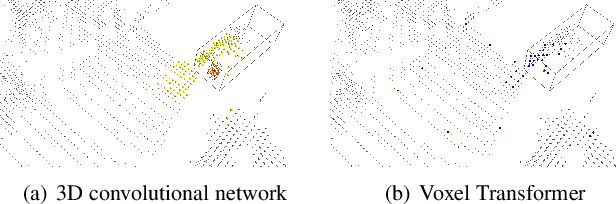
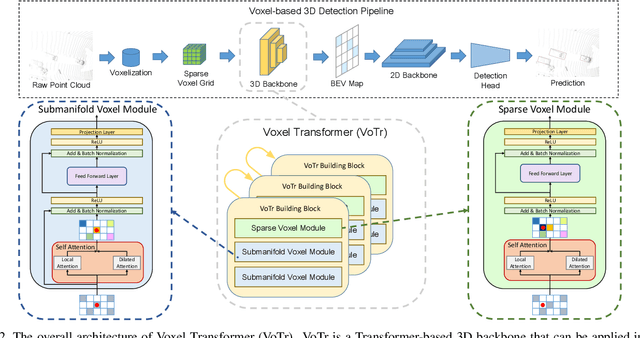
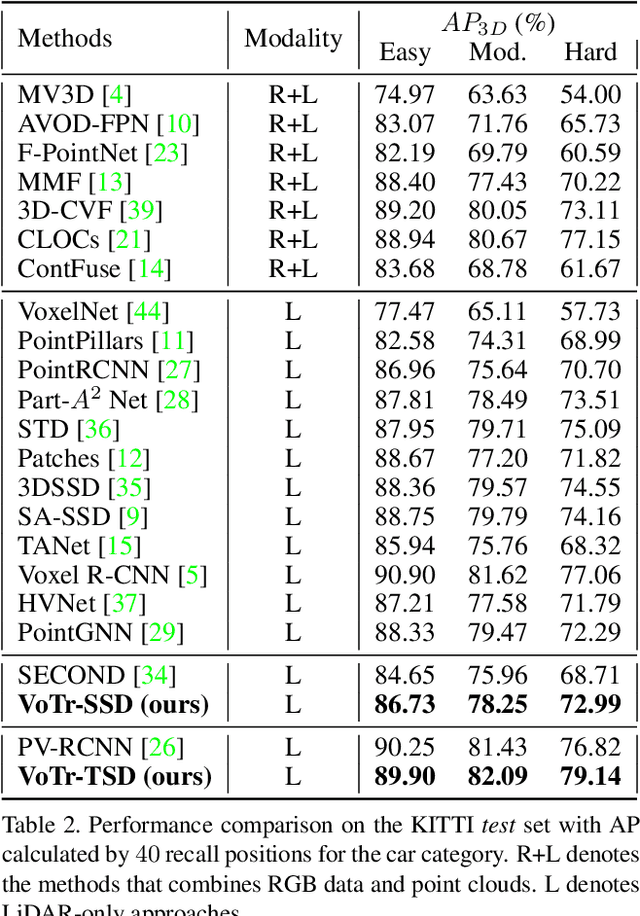
We present Voxel Transformer (VoTr), a novel and effective voxel-based Transformer backbone for 3D object detection from point clouds. Conventional 3D convolutional backbones in voxel-based 3D detectors cannot efficiently capture large context information, which is crucial for object recognition and localization, owing to the limited receptive fields. In this paper, we resolve the problem by introducing a Transformer-based architecture that enables long-range relationships between voxels by self-attention. Given the fact that non-empty voxels are naturally sparse but numerous, directly applying standard Transformer on voxels is non-trivial. To this end, we propose the sparse voxel module and the submanifold voxel module, which can operate on the empty and non-empty voxel positions effectively. To further enlarge the attention range while maintaining comparable computational overhead to the convolutional counterparts, we propose two attention mechanisms for multi-head attention in those two modules: Local Attention and Dilated Attention, and we further propose Fast Voxel Query to accelerate the querying process in multi-head attention. VoTr contains a series of sparse and submanifold voxel modules and can be applied in most voxel-based detectors. Our proposed VoTr shows consistent improvement over the convolutional baselines while maintaining computational efficiency on the KITTI dataset and the Waymo Open dataset.