 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSA-LOAM: Semantic-aided LiDAR SLAM with Loop Closure
Paper and Code
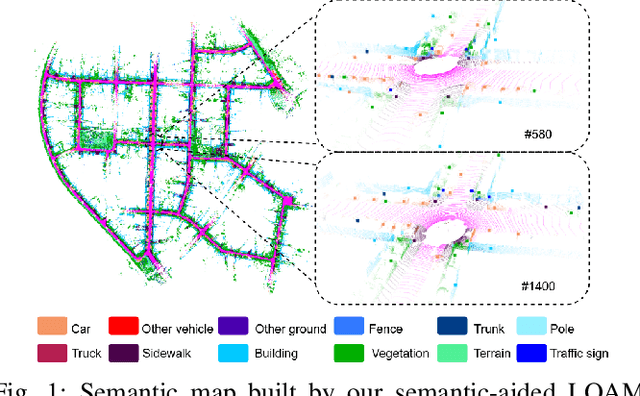
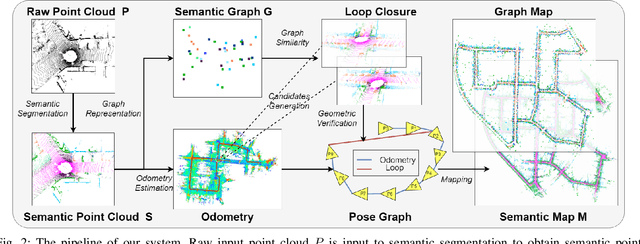
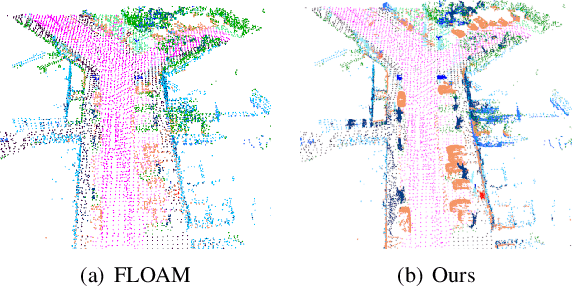
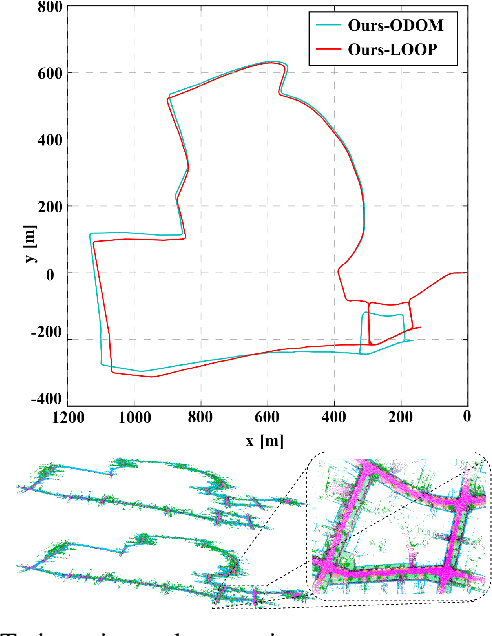
LiDAR-based SLAM system is admittedly more accurate and stable than others, while its loop closure detection is still an open issue. With the development of 3D semantic segmentation for point cloud, semantic information can be obtained conveniently and steadily, essential for high-level intelligence and conductive to SLAM. In this paper, we present a novel semantic-aided LiDAR SLAM with loop closure based on LOAM, named SA-LOAM, which leverages semantics in odometry as well as loop closure detection. Specifically, we propose a semantic-assisted ICP, including semantically matching, downsampling and plane constraint, and integrates a semantic graph-based place recognition method in our loop closure detection module. Benefitting from semantics, we can improve the localization accuracy, detect loop closures effectively, and construct a global consistent semantic map even in large-scale scenes. Extensive experiments on KITTI and Ford Campus dataset show that our system significantly improves baseline performance, has generalization ability to unseen data and achieves competitive results compared with state-of-the-art methods.