 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCanonical Voting: Towards Robust Oriented Bounding Box Detection in 3D Scenes
Paper and Code
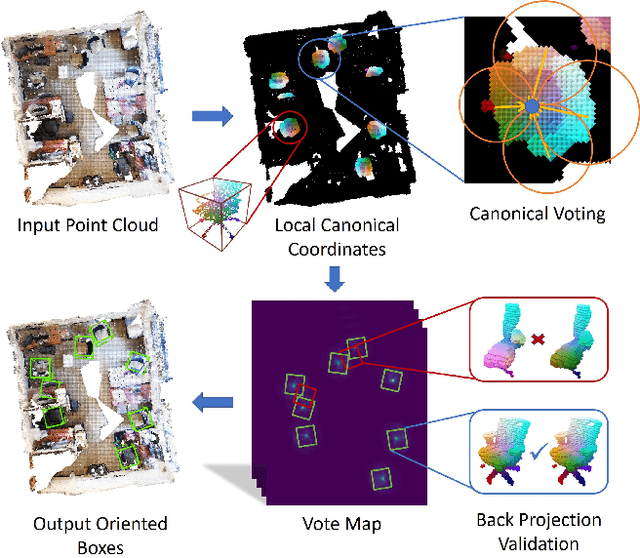

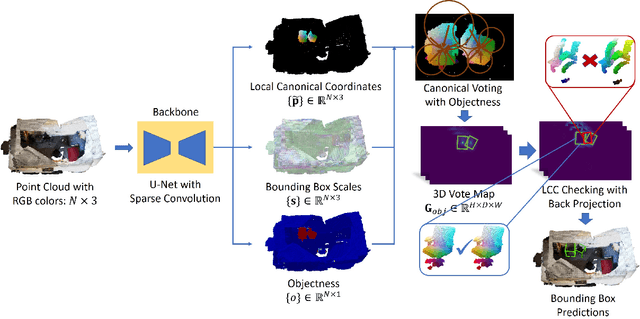
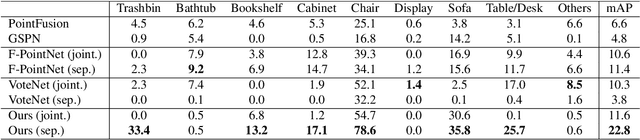
3D object detection has attracted much attention thanks to the advances in sensors and deep learning methods for point clouds. Current state-of-the-art methods like VoteNet regress direct offset towards object centers and box orientations with an additional Multi-Layer-Perceptron network. Both their offset and orientation predictions are not accurate due to the fundamental difficulty in rotation classification. In the work, we disentangle the direct offset into Local Canonical Coordinates (LCC), box scales and box orientations. Only LCC and box scales are regressed while box orientations are generated by a canonical voting scheme. Finally, a LCC-aware back-projection checking algorithm iteratively cuts out bounding boxes from the generated vote maps, with the elimination of false positives. Our model achieves state-of-the-art performance on challenging large-scale datasets of real point cloud scans: ScanNet, SceneNN with 11.4 and 5.3 mAP improvement respectively. Code is available on https://github.com/qq456cvb/CanonicalVoting.