 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Human-Level Learning of Complex Physical Puzzles
Paper and Code
Nov 14, 2020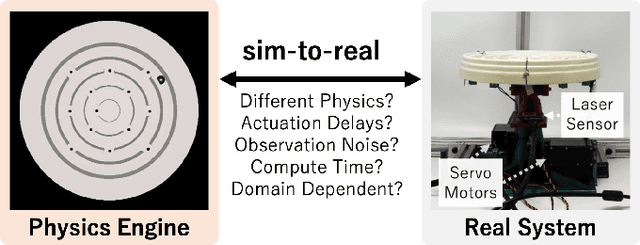
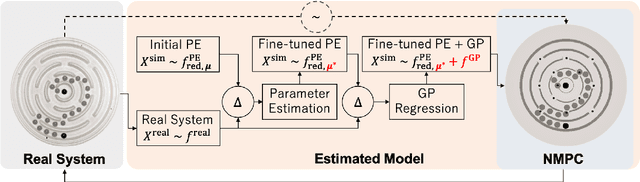
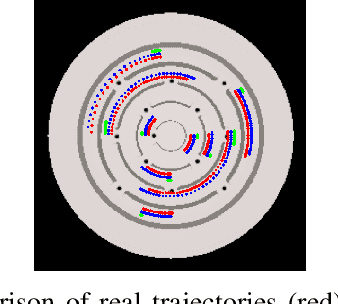
Humans quickly solve tasks in novel systems with complex dynamics, without requiring much interaction. While deep reinforcement learning algorithms have achieved tremendous success in many complex tasks, these algorithms need a large number of samples to learn meaningful policies. In this paper, we present a task for navigating a marble to the center of a circular maze. While this system is very intuitive and easy for humans to solve, it can be very difficult and inefficient for standard reinforcement learning algorithms to learn meaningful policies. We present a model that learns to move a marble in the complex environment within minutes of interacting with the real system. Learning consists of initializing a physics engine with parameters estimated using data from the real system. The error in the physics engine is then corrected using Gaussian process regression, which is used to model the residual between real observations and physics engine simulations. The physics engine equipped with the residual model is then used to control the marble in the maze environment using a model-predictive feedback over a receding horizon. We contrast the learning behavior against the time taken by humans to solve the problem to show comparable behavior. To the best of our knowledge, this is the first time that a hybrid model consisting of a full physics engine along with a statistical function approximator has been used to control a complex physical system in real-time using nonlinear model-predictive control (NMPC). Codes for the simulation environment can be downloaded here https://www.merl.com/research/license/CME . A video describing our method could be found here https://youtu.be/xaxNCXBovpc .