 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Social Distancing in Urban Environments using a Quadruped Robot
Paper and Code
Aug 20, 2020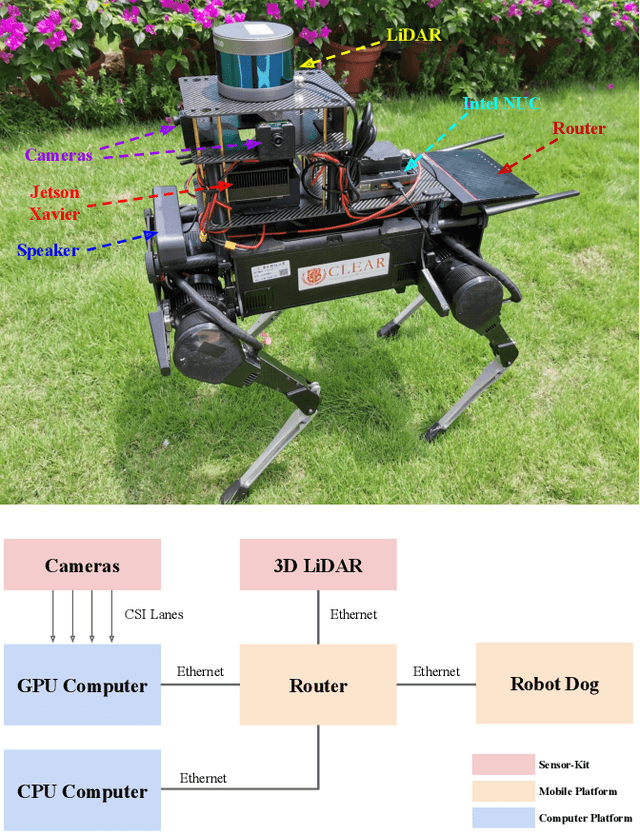
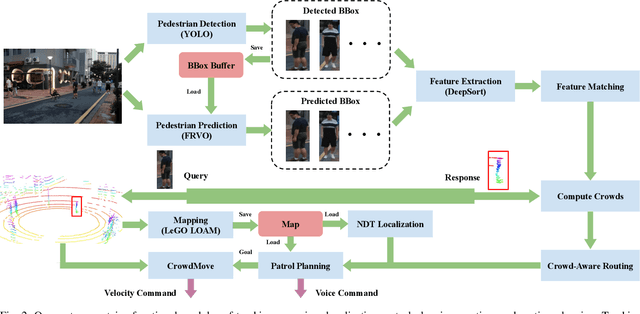
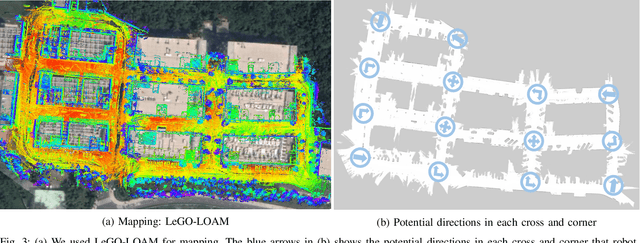
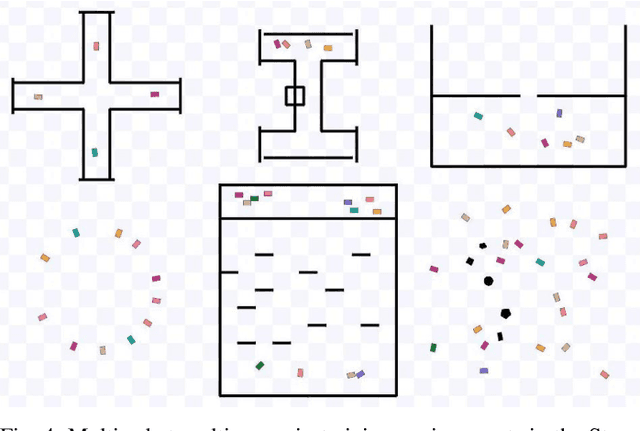
COVID-19 pandemic has become a global challenge faced by people all over the world. Social distancing has been proved to be an effective practice to reduce the spread of COVID-19. Against this backdrop, we propose that the surveillance robots can not only monitor but also promote social distancing. Robots can be flexibly deployed and they can take precautionary actions to remind people of practicing social distancing. In this paper, we introduce a fully autonomous surveillance robot based on a quadruped platform that can promote social distancing in complex urban environments. Specifically, to achieve autonomy, we mount multiple cameras and a 3D LiDAR on the legged robot. The robot then uses an onboard real-time social distancing detection system to track nearby pedestrian groups. Next, the robot uses a crowd-aware navigation algorithm to move freely in highly dynamic scenarios. The robot finally uses a crowd-aware routing algorithm to effectively promote social distancing by using human-friendly verbal cues to send suggestions to over-crowded pedestrians. We demonstrate and validate that our robot can be operated autonomously by conducting several experiments in various urban scenarios.