 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Task Reinforcement Learning based Mobile Manipulation Control for Dynamic Object Tracking and Grasping
Paper and Code
Jun 07, 2020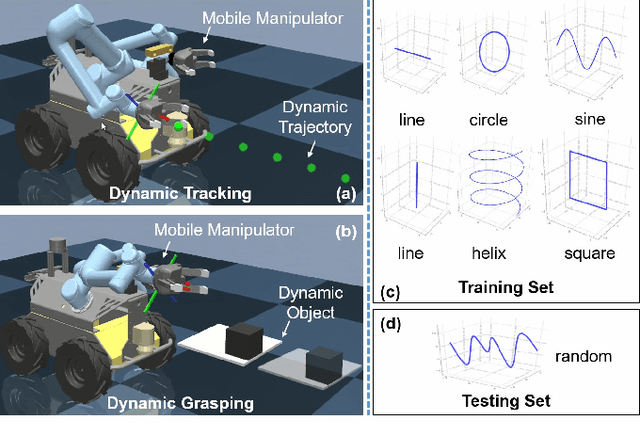
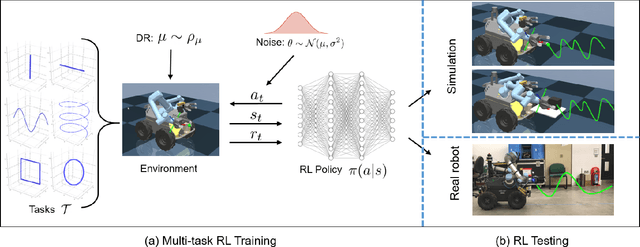
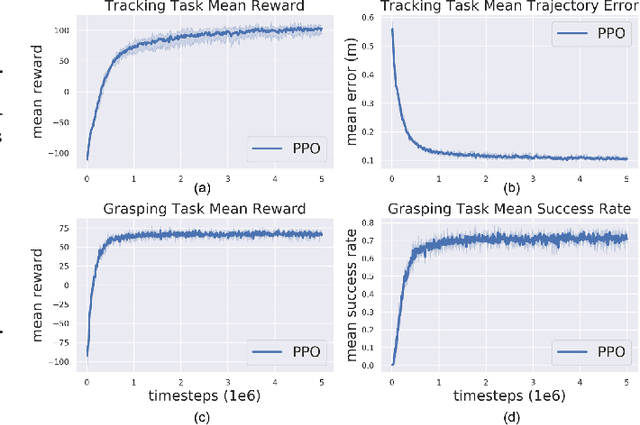
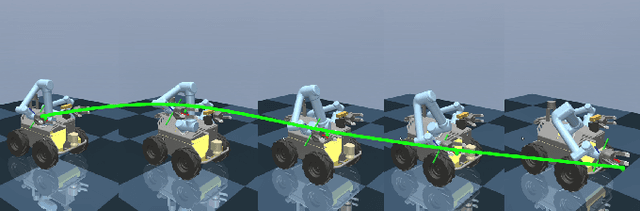
Agile control of mobile manipulator is challenging because of the high complexity coupled by the robotic system and the unstructured working environment. Tracking and grasping a dynamic object with a random trajectory is even harder. In this paper, a multi-task reinforcement learning-based mobile manipulation control framework is proposed to achieve general dynamic object tracking and grasping. Several basic types of dynamic trajectories are chosen as the task training set. To improve the policy generalization in practice, random noise and dynamics randomization are introduced during the training process. Extensive experiments show that our policy trained can adapt to unseen random dynamic trajectories with about 0.1m tracking error and 75\% grasping success rate of dynamic objects. The trained policy can also be successfully deployed on a real mobile manipulator.