 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInsSo3D: Inertial Navigation System and 3D Sonar SLAM for turbid environment inspection
Jan 09, 2026This paper presents InsSo3D, an accurate and efficient method for large-scale 3D Simultaneous Localisation and Mapping (SLAM) using a 3D Sonar and an Inertial Navigation System (INS). Unlike traditional sonar, which produces 2D images containing range and azimuth information but lacks elevation information, 3D Sonar produces a 3D point cloud, which therefore does not suffer from elevation ambiguity. We introduce a robust and modern SLAM framework adapted to the 3D Sonar data using INS as prior, detecting loop closure and performing pose graph optimisation. We evaluated InsSo3D performance inside a test tank with access to ground truth data and in an outdoor flooded quarry. Comparisons to reference trajectories and maps obtained from an underwater motion tracking system and visual Structure From Motion (SFM) demonstrate that InsSo3D efficiently corrects odometry drift. The average trajectory error is below 21cm during a 50-minute-long mission, producing a map of 10m by 20m with a 9cm average reconstruction error, enabling safe inspection of natural or artificial underwater structures even in murky water conditions.
VISO: Robust Underwater Visual-Inertial-Sonar SLAM with Photometric Rendering for Dense 3D Reconstruction
Jan 03, 2026Visual challenges in underwater environments significantly hinder the accuracy of vision-based localisation and the high-fidelity dense reconstruction. In this paper, we propose VISO, a robust underwater SLAM system that fuses a stereo camera, an inertial measurement unit (IMU), and a 3D sonar to achieve accurate 6-DoF localisation and enable efficient dense 3D reconstruction with high photometric fidelity. We introduce a coarse-to-fine online calibration approach for extrinsic parameters estimation between the 3D sonar and the camera. Additionally, a photometric rendering strategy is proposed for the 3D sonar point cloud to enrich the sonar map with visual information. Extensive experiments in a laboratory tank and an open lake demonstrate that VISO surpasses current state-of-the-art underwater and visual-based SLAM algorithms in terms of localisation robustness and accuracy, while also exhibiting real-time dense 3D reconstruction performance comparable to the offline dense mapping method.
Towards reliable subsea object recovery: a simulation study of an auv with a suction-actuated end effector
Jan 03, 2026Autonomous object recovery in the hadal zone is challenging due to extreme hydrostatic pressure, limited visibility and currents, and the need for precise manipulation at full ocean depth. Field experimentation in such environments is costly, high-risk, and constrained by limited vehicle availability, making early validation of autonomous behaviors difficult. This paper presents a simulation-based study of a complete autonomous subsea object recovery mission using a Hadal Small Vehicle (HSV) equipped with a three-degree-of-freedom robotic arm and a suction-actuated end effector. The Stonefish simulator is used to model realistic vehicle dynamics, hydrodynamic disturbances, sensing, and interaction with a target object under hadal-like conditions. The control framework combines a world-frame PID controller for vehicle navigation and stabilization with an inverse-kinematics-based manipulator controller augmented by acceleration feed-forward, enabling coordinated vehicle - manipulator operation. In simulation, the HSV autonomously descends from the sea surface to 6,000 m, performs structured seafloor coverage, detects a target object, and executes a suction-based recovery. The results demonstrate that high-fidelity simulation provides an effective and low-risk means of evaluating autonomous deep-sea intervention behaviors prior to field deployment.
The Marine Debris Forward-Looking Sonar Datasets
Mar 28, 2025Sonar sensing is fundamental for underwater robotics, but limited by capabilities of AI systems, which need large training datasets. Public data in sonar modalities is lacking. This paper presents the Marine Debris Forward-Looking Sonar datasets, with three different settings (watertank, turntable, flooded quarry) increasing dataset diversity and multiple computer vision tasks: object classification, object detection, semantic segmentation, patch matching, and unsupervised learning. We provide full dataset description, basic analysis and initial results for some tasks. We expect the research community will benefit from this dataset, which is publicly available at https://doi.org/10.5281/zenodo.15101686
Enhancing AUV Autonomy With Model Predictive Path Integral Control
Aug 10, 2023



Autonomous underwater vehicles (AUVs) play a crucial role in surveying marine environments, carrying out underwater inspection tasks, and ocean exploration. However, in order to ensure that the AUV is able to carry out its mission successfully, a control system capable of adapting to changing environmental conditions is required. Furthermore, to ensure the robotic platform's safe operation, the onboard controller should be able to operate under certain constraints. In this work, we investigate the feasibility of Model Predictive Path Integral Control (MPPI) for the control of an AUV. We utilise a non-linear model of the AUV to propagate the samples of the MPPI, which allow us to compute the control action in real time. We provide a detailed evaluation of the effect of the main hyperparameters on the performance of the MPPI controller. Furthermore, we compared the performance of the proposed method with a classical PID and Cascade PID approach, demonstrating the superiority of our proposed controller. Finally, we present results where environmental constraints are added and show how MPPI can handle them by simply incorporating those constraints in the cost function.
Temporal Planning with Incomplete Knowledge and Perceptual Information
Jul 20, 2022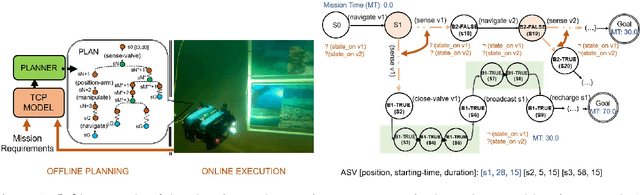
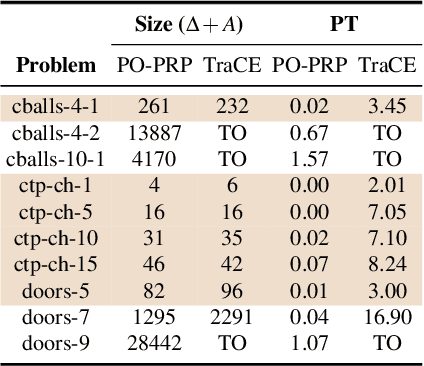
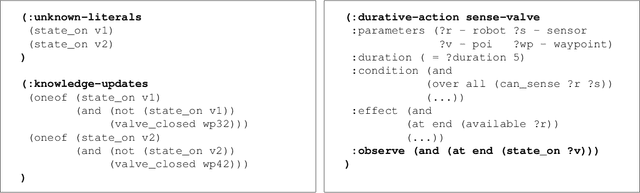
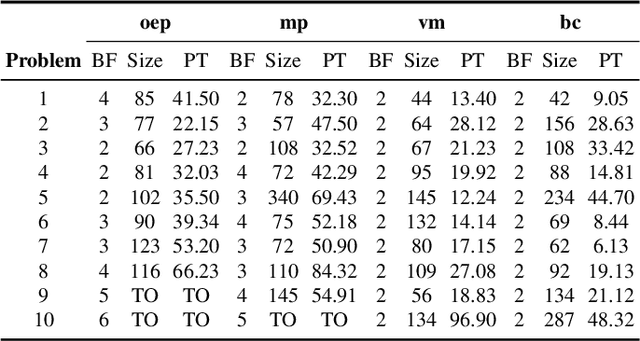
In real-world applications, the ability to reason about incomplete knowledge, sensing, temporal notions, and numeric constraints is vital. While several AI planners are capable of dealing with some of these requirements, they are mostly limited to problems with specific types of constraints. This paper presents a new planning approach that combines contingent plan construction within a temporal planning framework, offering solutions that consider numeric constraints and incomplete knowledge. We propose a small extension to the Planning Domain Definition Language (PDDL) to model (i) incomplete, (ii) knowledge sensing actions that operate over unknown propositions, and (iii) possible outcomes from non-deterministic sensing effects. We also introduce a new set of planning domains to evaluate our solver, which has shown good performance on a variety of problems.
* In Proceedings AREA 2022, arXiv:2207.09058
From market-ready ROVs to low-cost AUVs
Aug 12, 2021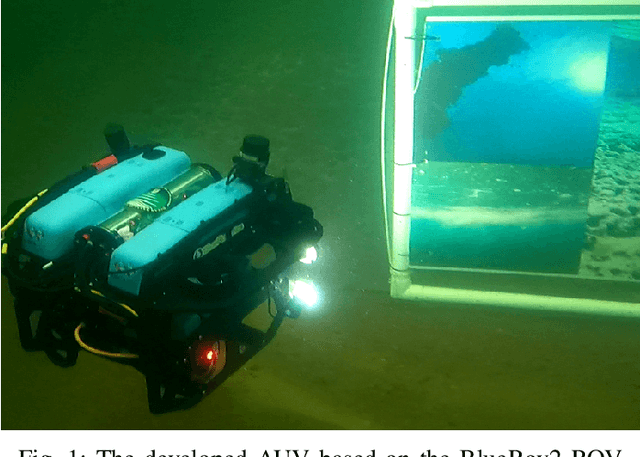
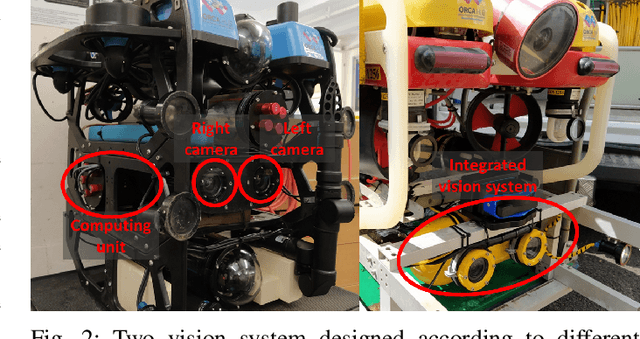
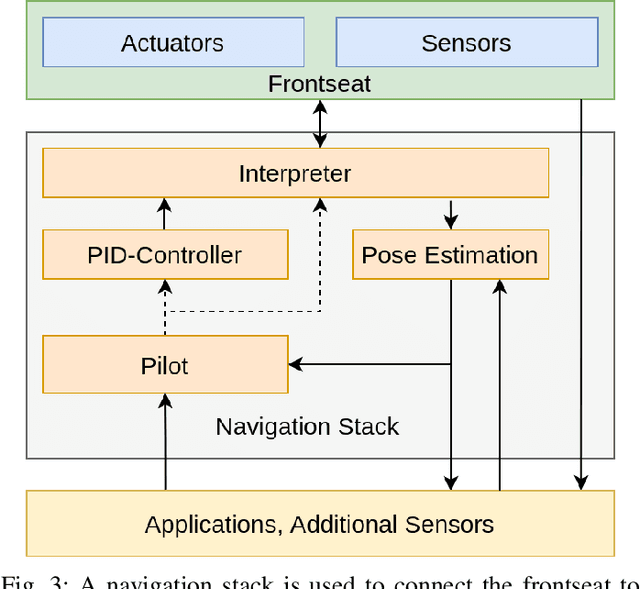
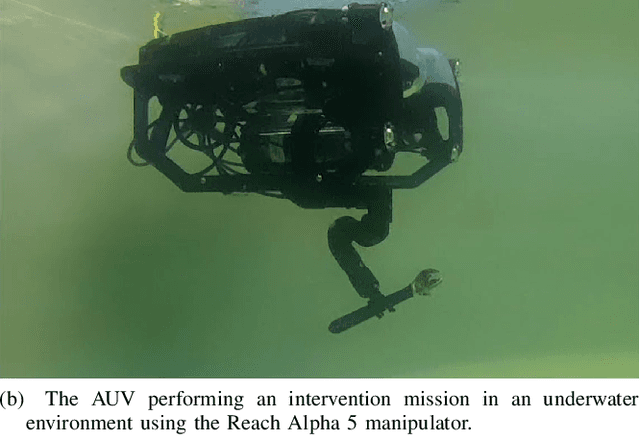
Autonomous Underwater Vehicles (AUVs) are becoming increasingly important for different types of industrial applications. The generally high cost of (AUVs) restricts the access to them and therefore advances in research and technological development. However, recent advances have led to lower cost commercially available Remotely Operated Vehicles (ROVs), which present a platform that can be enhanced to enable a high degree of autonomy, similar to that of a high-end (AUV). In this article, we present how a low-cost commercial-off-the-shelf (ROV) can be used as a foundation for developing versatile and affordable (AUVs). We introduce the required hardware modifications to obtain a system capable of autonomous operations as well as the necessary software modules. Additionally, we present a set of use cases exhibiting the versatility of the developed platform for intervention and mapping tasks.
Underwater inspection and intervention dataset
Jul 28, 2021
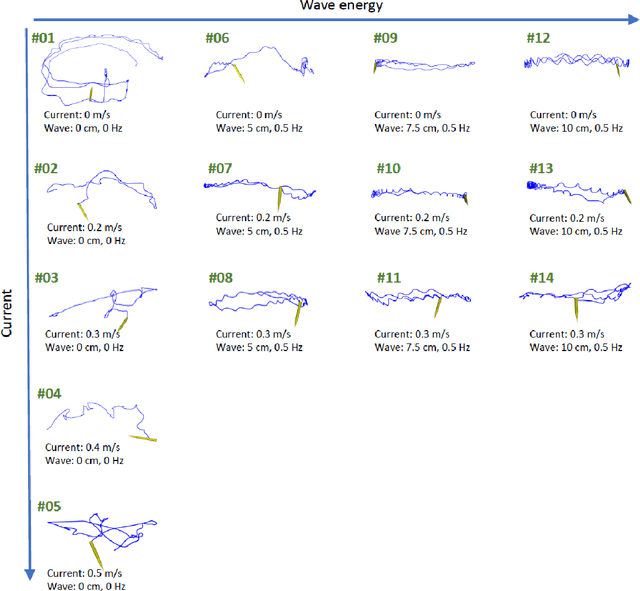
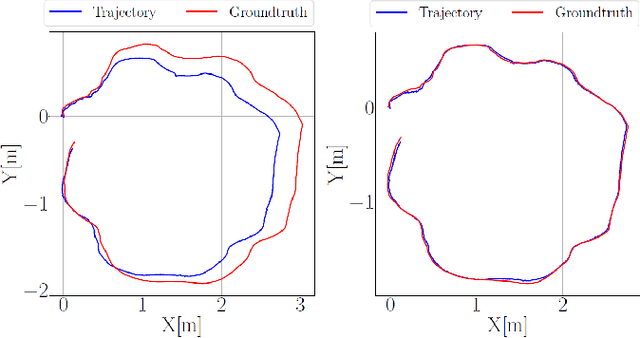
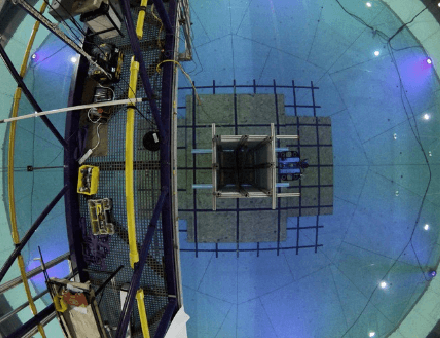
This paper presents a novel dataset for the development of visual navigation and simultaneous localisation and mapping (SLAM) algorithms as well as for underwater intervention tasks. It differs from existing datasets as it contains ground truth for the vehicle's position captured by an underwater motion tracking system. The dataset contains distortion-free and rectified stereo images along with the calibration parameters of the stereo camera setup. Furthermore, the experiments were performed and recorded in a controlled environment, where current and waves could be generated allowing the dataset to cover a wide range of conditions - from calm water to waves and currents of significant strength.
Radar SLAM: A Robust SLAM System for All Weather Conditions
Apr 12, 2021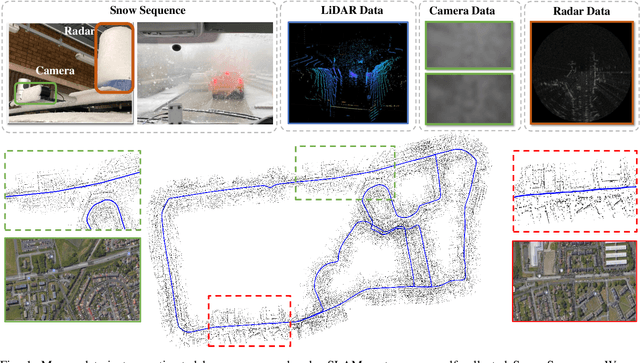
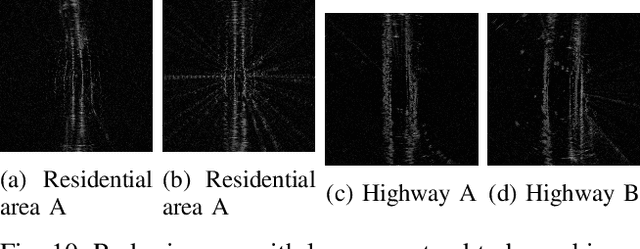
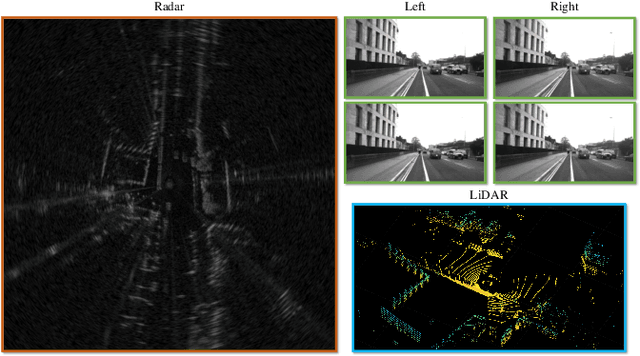
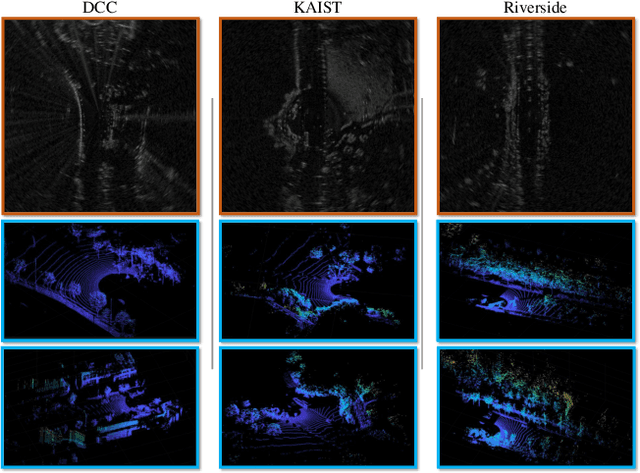
A Simultaneous Localization and Mapping (SLAM) system must be robust to support long-term mobile vehicle and robot applications. However, camera and LiDAR based SLAM systems can be fragile when facing challenging illumination or weather conditions which degrade their imagery and point cloud data. Radar, whose operating electromagnetic spectrum is less affected by environmental changes, is promising although its distinct sensing geometry and noise characteristics bring open challenges when being exploited for SLAM. % However, there are still open challenges since most existing visual and LiDAR SLAM systems do not operate in bad weathers. This paper studies the use of a Frequency Modulated Continuous Wave radar for SLAM in large-scale outdoor environments. We propose a full radar SLAM system, including a novel radar motion tracking algorithm that leverages radar geometry for reliable feature tracking. It also optimally compensates motion distortion and estimates pose by joint optimization. Its loop closure component is designed to be simple yet efficient for radar imagery by capturing and exploiting structural information of the surrounding environment. % while a scheme to reject ambiguous loop closure candidates is also designed specifically for radar. Extensive experiments on three public radar datasets, ranging from city streets and residential areas to countryside and highways, show competitive accuracy and reliability performance of the proposed radar SLAM system compared to the state-of-the-art LiDAR, vision and radar methods. The results show that our system is technically viable in achieving reliable SLAM in extreme weather conditions, e.g. heavy snow and dense fog, demonstrating the promising potential of using radar for all-weather localization and mapping.
Path Planning for Manipulation using Experience-driven Random Trees
Feb 28, 2021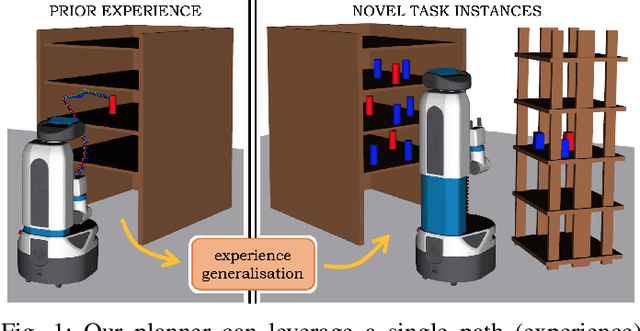
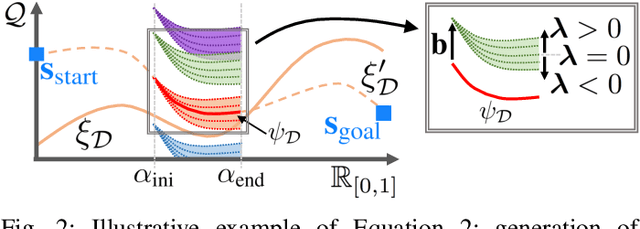

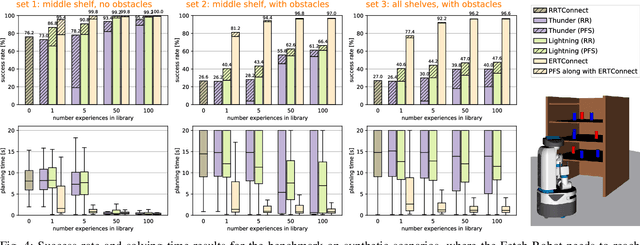
Robotic systems may frequently come across similar manipulation planning problems that result in similar motion plans. Instead of planning each problem from scratch, it is preferable to leverage previously computed motion plans, i.e., experiences, to ease the planning. Different approaches have been proposed to exploit prior information on novel task instances. These methods, however, rely on a vast repertoire of experiences and fail when none relates closely to the current problem. Thus, an open challenge is the ability to generalise prior experiences to task instances that do not necessarily resemble the prior. This work tackles the above challenge with the proposition that experiences are "decomposable" and "malleable", i.e., parts of an experience are suitable to relevantly explore the connectivity of the robot-task space even in non-experienced regions. Two new planners result from this insight: experience-driven random trees (ERT) and its bi-directional version ERTConnect. These planners adopt a tree sampling-based strategy that incrementally extracts and modulates parts of a single path experience to compose a valid motion plan. We demonstrate our method on task instances that significantly differ from the prior experiences, and compare with related state-of-the-art experience-based planners. While their repairing strategies fail to generalise priors of tens of experiences, our planner, with a single experience, significantly outperforms them in both success rate and planning time. Our planners are implemented and freely available in the Open Motion Planning Library.