 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVectorNet: Encoding HD Maps and Agent Dynamics from Vectorized Representation
Paper and Code
May 08, 2020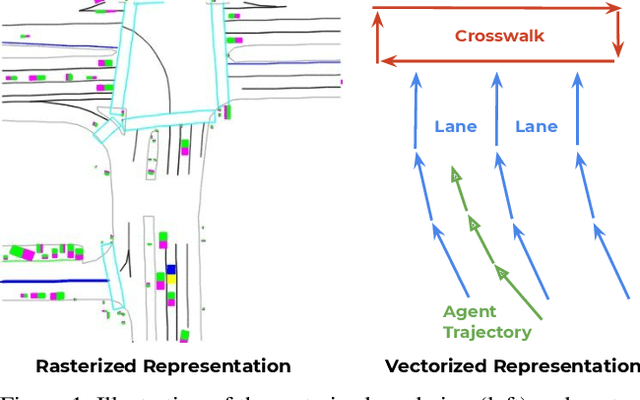
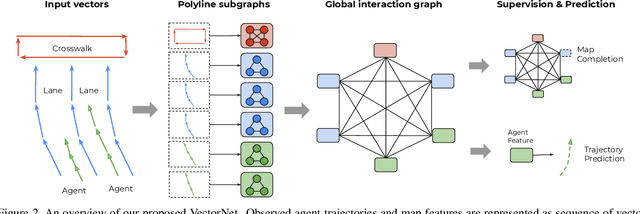
Behavior prediction in dynamic, multi-agent systems is an important problem in the context of self-driving cars, due to the complex representations and interactions of road components, including moving agents (e.g. pedestrians and vehicles) and road context information (e.g. lanes, traffic lights). This paper introduces VectorNet, a hierarchical graph neural network that first exploits the spatial locality of individual road components represented by vectors and then models the high-order interactions among all components. In contrast to most recent approaches, which render trajectories of moving agents and road context information as bird-eye images and encode them with convolutional neural networks (ConvNets), our approach operates on a vector representation. By operating on the vectorized high definition (HD) maps and agent trajectories, we avoid lossy rendering and computationally intensive ConvNet encoding steps. To further boost VectorNet's capability in learning context features, we propose a novel auxiliary task to recover the randomly masked out map entities and agent trajectories based on their context. We evaluate VectorNet on our in-house behavior prediction benchmark and the recently released Argoverse forecasting dataset. Our method achieves on par or better performance than the competitive rendering approach on both benchmarks while saving over 70% of the model parameters with an order of magnitude reduction in FLOPs. It also outperforms the state of the art on the Argoverse dataset.