 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiverse and Admissible Trajectory Forecasting through Multimodal Context Understanding
Paper and Code
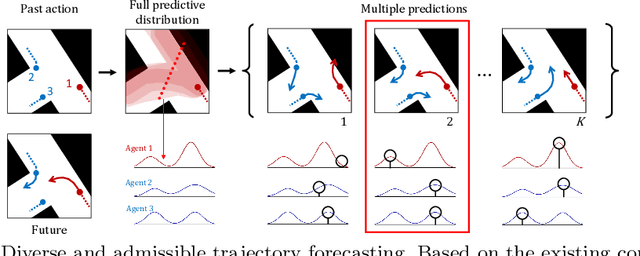
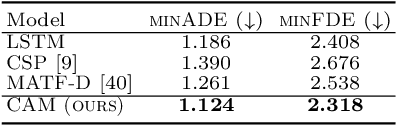
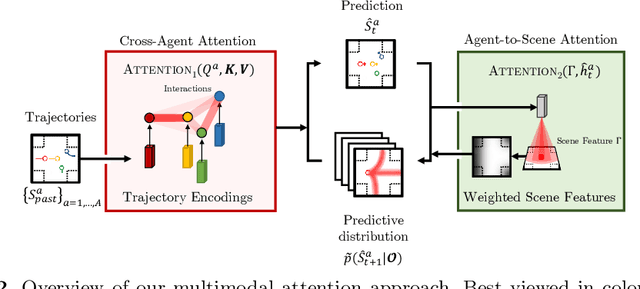
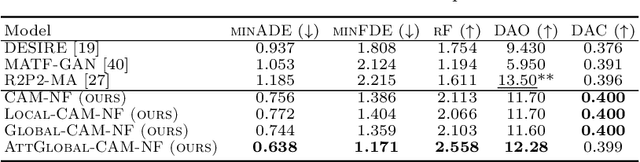
Multi-agent trajectory forecasting in autonomous driving requires an agent to accurately anticipate the behaviors of the surrounding vehicles and pedestrians, for safe and reliable decision-making. Due to partial observability over the goals, contexts, and interactions of agents in these dynamical scenes, directly obtaining the posterior distribution over future agent trajectories remains a challenging problem. In realistic embodied environments, each agent's future trajectories should be diverse since multiple plausible sequences of actions can be used to reach its intended goals, and they should be admissible since they must obey physical constraints and stay in drivable areas. In this paper, we propose a model that fully synthesizes multiple input signals from the multimodal world|the environment's scene context and interactions between multiple surrounding agents|to best model all diverse and admissible trajectories. We offer new metrics to evaluate the diversity of trajectory predictions, while ensuring admissibility of each trajectory. Based on our new metrics as well as those used in prior work, we compare our model with strong baselines and ablations across two datasets and show a 35% performance-improvement over the state-of-the-art.