 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Connectivity Control in Quadcopters: a Field Study of Communication Performance
Paper and Code
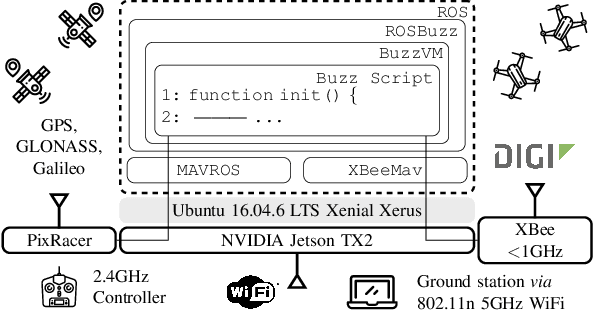
Redundancy and parallelism make decentralized multi-robot systems appealing solutions for the exploration of extreme environments. However, effective cooperation often requires team-wide connectivity and a carefully designed communication strategy. Several recently proposed decentralized connectivity maintenance approaches exploit elegant algebraic results drawn from spectral graph theory. Yet, these proposals are rarely taken beyond simulations or laboratory implementations. In this work, we present two major contributions: (i) we describe the full-stack implementation---from hardware to software---of a decentralized control law for robust connectivity maintenance; and (ii) we assess, in the field, our setup's ability to correctly exchange all the necessary information required to maintain connectivity in a team of quadcopters.