 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Sparse Semantic HD Maps for Self-Driving Vehicle Localization
Paper and Code
Aug 08, 2019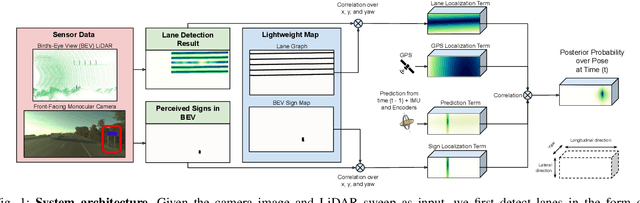
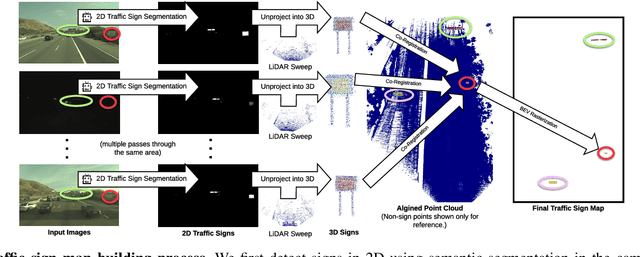
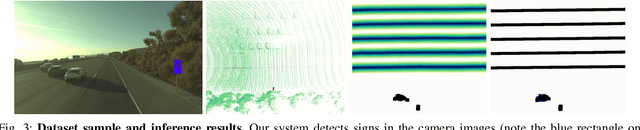
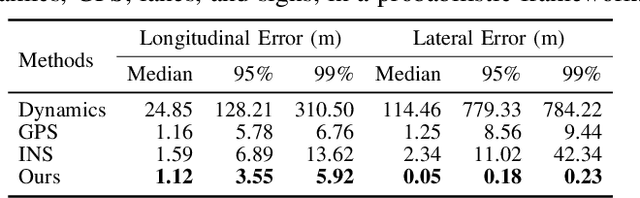
In this paper we propose a novel semantic localization algorithm that exploits multiple sensors and has precision on the order of a few centimeters. Our approach does not require detailed knowledge about the appearance of the world, and our maps require orders of magnitude less storage than maps utilized by traditional geometry- and LiDAR intensity-based localizers. This is important as self-driving cars need to operate in large environments. Towards this goal, we formulate the problem in a Bayesian filtering framework, and exploit lanes, traffic signs, as well as vehicle dynamics to localize robustly with respect to a sparse semantic map. We validate the effectiveness of our method on a new highway dataset consisting of 312km of roads. Our experiments show that the proposed approach is able to achieve 0.05m lateral accuracy and 1.12m longitudinal accuracy on average while taking up only 0.3% of the storage required by previous LiDAR intensity-based approaches.