 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Attention Memory for Visual Navigation
Paper and Code
Jun 04, 2019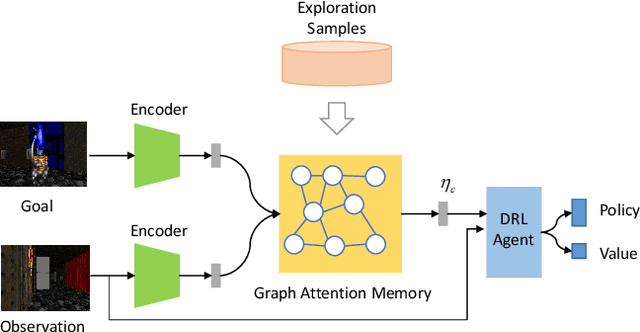
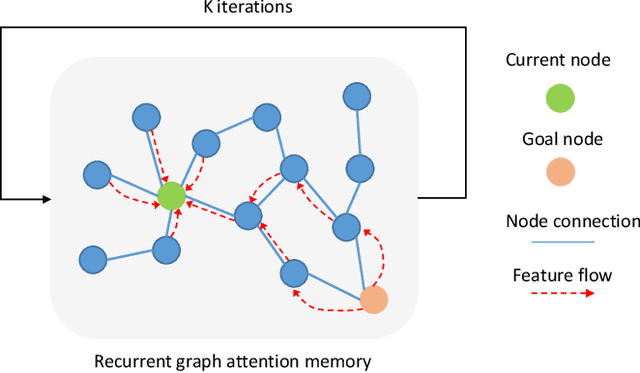
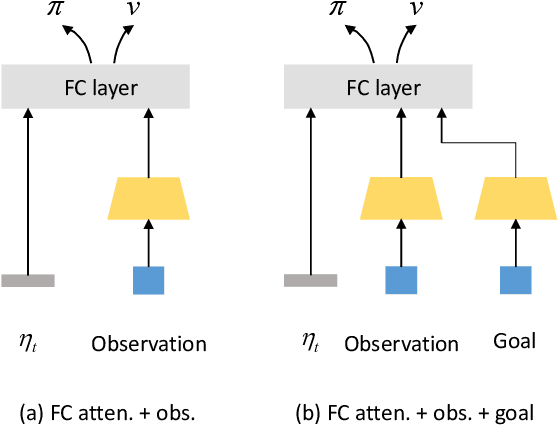
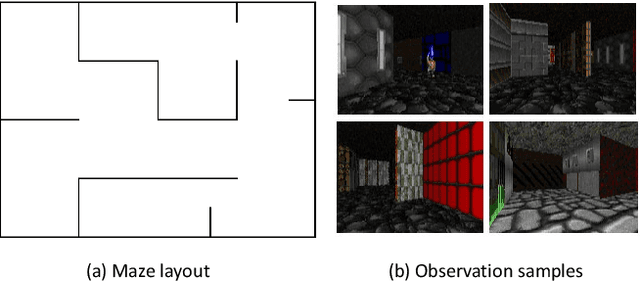
Visual navigation in complex environments is inefficient with traditional reactive policy or general-purposed recurrent policy. To address the long-term memory issue, this paper proposes a graph attention memory (GAM) architecture consisting of memory construction module, graph attention module and control module. The memory construction module builds the topological graph based on supervised learning by taking the exploration prior. Then, guided attention features are extracted with the graph attention module. Finally, the deep reinforcement learning based control module makes decisions based on visual observations and guided attention features. Detailed convergence analysis of GAM is presented in this paper. We evaluate GAM-based navigation system in two complex 3D environments. Experimental results show that the GAM-based navigation system significantly improves learning efficiency and outperforms all baselines in average success rate.