Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Summary of the 4th International Workshop on Recovering 6D Object Pose
Paper and Code
Oct 09, 2018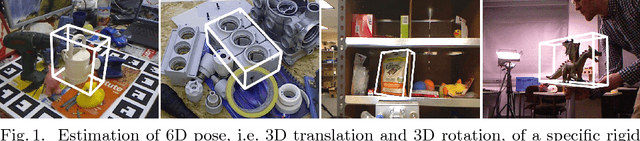
This document summarizes the 4th International Workshop on Recovering 6D Object Pose which was organized in conjunction with ECCV 2018 in Munich. The workshop featured four invited talks, oral and poster presentations of accepted workshop papers, and an introduction of the BOP benchmark for 6D object pose estimation. The workshop was attended by 100+ people working on relevant topics in both academia and industry who shared up-to-date advances and discussed open problems.
* In: Computer Vision - ECCV 2018 Workshops - Munich, Germany,
September 8-9 and 14, 2018, Proceedings
View paper on