 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA transformable slender microrobot inspired by nematode parasites for interventional endovascular surgery
Apr 15, 2026Cardiovascular diseases account for around 17.9 million deaths per year globally, the treatment of which is challenging considering the confined space and complex topology of the vascular network and high risks during operations. Robots, although promising, still face the dilemma of possessing versatility or maneuverability after decades of development. Inspired by nematodes, the parasites living, feeding, and moving in the human body's vascular system, this work develops a transformable slender magnetic microrobot. Based on the experiments and analyses, we optimize the fabrication and geometry of the robot and finally create a slender prototype with an aspect ratio larger than 100 (smaller than 200 microns in diameter and longer than 20 mm in length), which possesses uniformly distributed magnetic beads on the body of an ultrathin polymer string and a big bead on the head. This prototype shows great flexibility (largest curvature 0.904 mm-1) and locomotion capability (the maximum speed: 125 mm/s). Moreover, the nematode-inspired robot can pass through sharp turns with a radius of 0.84 mm and holes distributed in three-dimensional (3D) space. We also display the potential application in interventional surgery of the microrobot by navigating it through a narrow blood vessel mold to wrap and transport a drug (95 times heavier than the robot) by deforming the robot's slender body and releasing the drug to the aim position finally. Moreover, the robot also demonstrates the possible applications in embolization by transforming and winding itself into an aneurysms phantom and exhibits its outstanding injectability by being successfully withdrawn and injected through a medical needle (diameter: 1.2 mm) of a syringe.
LatentChem: From Textual CoT to Latent Thinking in Chemical Reasoning
Feb 06, 2026Chemical large language models (LLMs) predominantly rely on explicit Chain-of-Thought (CoT) in natural language to perform complex reasoning. However, chemical reasoning is inherently continuous and structural, and forcing it into discrete linguistic tokens introduces a fundamental representation mismatch that constrains both efficiency and performance. We introduce LatentChem, a latent reasoning interface that decouples chemical computation from textual generation, enabling models to perform multi-step reasoning directly in continuous latent space while emitting language only for final outputs. Remarkably, we observe a consistent emergent behavior: when optimized solely for task success, models spontaneously internalize reasoning, progressively abandoning verbose textual derivations in favor of implicit latent computation. This shift is not merely stylistic but computationally advantageous. Across diverse chemical reasoning benchmarks, LatentChem achieves a 59.88\% non-tie win rate over strong CoT-based baselines on ChemCoTBench, while delivering a 10.84$\times$ average inference speedup. Our results provide empirical evidence that chemical reasoning is more naturally and effectively realized as continuous latent dynamics rather than discretized linguistic trajectories.
Origami-inspired soft twisting actuator
Nov 03, 2021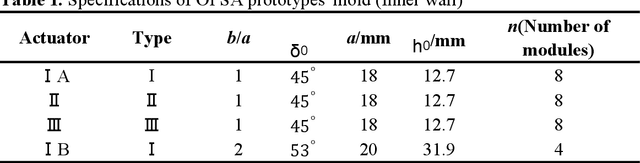
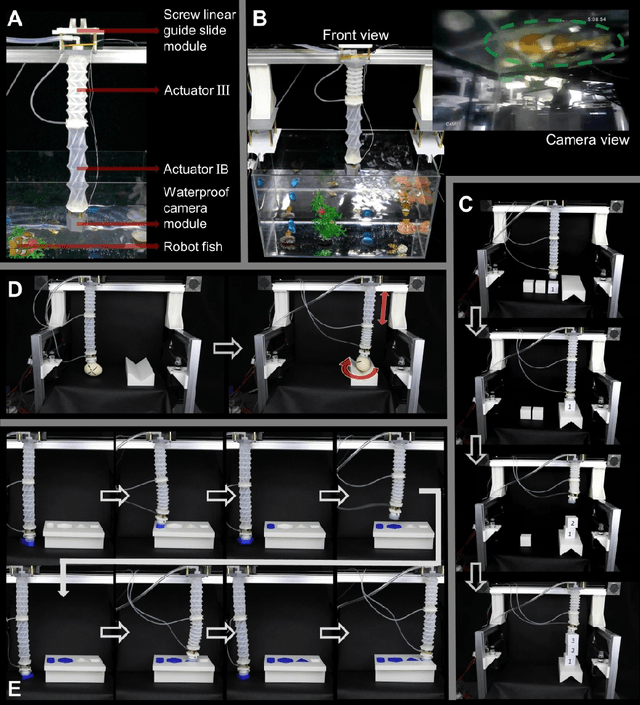
Soft actuators have shown great advantages in compliance and morphology matched for manipulation of delicate objects and inspection in a confined space. There is an unmet need for a soft actuator that can provide torsional motion to e.g. enlarge working space and increase degrees of freedom. Towards this goal, we present origami-inspired soft pneumatic actuators (OSPAs) made from silicone. The prototype can output a rotation of more than one revolution (up to 435{\deg}), larger than previous counterparts. We describe the design and fabrication method, build the kinematics models and simulation models, and analyze and optimize the parameters. Finally, we demonstrate the potentially extensive utility of OSPAs through their integration into a gripper capable of simultaneously grasping and lifting fragile or flat objects, a versatile robot arm capable of picking and placing items at the right angle with the twisting actuators, and a soft snake robot capable of changing attitude and directions by torsion of the twisting actuators.