 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal Fokker--Planck Geometry for Score Estimation: Heat-Ball Mean-Value Representations and Exact High-Dimensional Sampling
Jun 26, 2026Score-based generative models and Langevin samplers rely on estimating the score function $\nabla_x\log p_t(x)$ of a forward diffusion. Classically this is tractable when the drift is linear: the marginal density is Gaussian and the score is a global conditional expectation. For a general nonlinear, state-dependent drift the marginal density has no closed form, and existing methods--denoising score matching and global Fokker--Planck residual penalties--resort to global averaging that inflates estimation error in low-density regions precisely where accuracy is most critical. We address this by developing a local Fokker--Planck geometric framework that replaces global conditioning with local parabolic averaging. Our approach rests on three contributions. First, a time change to the cumulative-variance coordinate reduces the variable-coefficient Fokker--Planck equation to a standard inhomogeneous heat equation, on which we extend Evans' classical heat-ball monotonicity method to derive exact local mean-value representations for the score $\nabla_x\log p$ together with the density, log-density, and entropy density; local well-posedness is established under an explicit dimension-dependent drift budget. Second, for high-dimensional Monte Carlo evaluation of the resulting heat-ball integrals, we introduce the $κ$-measure and derive its exact factorized sampler with unit per-sample weight, $χ^2_2$ radial concentration. Third, the $r\to0$ limit of the heat-ball residual recovers the pointwise Fokker--Planck residual, showing that the local framework is a one-parameter generalization of global FP-residual methods, and that the DSM population minimizer is feasible for the heat-ball constraint at every scale. We validate the framework on 2D structured data on 256-dimensional MNIST, and on a dedicated sampler study confirming the concentration laws.
TemporalFlowViz: Parameter-Aware Visual Analytics for Interpreting Scramjet Combustion Evolution
Sep 05, 2025



Understanding the complex combustion dynamics within scramjet engines is critical for advancing high-speed propulsion technologies. However, the large scale and high dimensionality of simulation-generated temporal flow field data present significant challenges for visual interpretation, feature differentiation, and cross-case comparison. In this paper, we present TemporalFlowViz, a parameter-aware visual analytics workflow and system designed to support expert-driven clustering, visualization, and interpretation of temporal flow fields from scramjet combustion simulations. Our approach leverages hundreds of simulated combustion cases with varying initial conditions, each producing time-sequenced flow field images. We use pretrained Vision Transformers to extract high-dimensional embeddings from these frames, apply dimensionality reduction and density-based clustering to uncover latent combustion modes, and construct temporal trajectories in the embedding space to track the evolution of each simulation over time. To bridge the gap between latent representations and expert reasoning, domain specialists annotate representative cluster centroids with descriptive labels. These annotations are used as contextual prompts for a vision-language model, which generates natural-language summaries for individual frames and full simulation cases. The system also supports parameter-based filtering, similarity-based case retrieval, and coordinated multi-view exploration to facilitate in-depth analysis. We demonstrate the effectiveness of TemporalFlowViz through two expert-informed case studies and expert feedback, showing TemporalFlowViz enhances hypothesis generation, supports interpretable pattern discovery, and enhances knowledge discovery in large-scale scramjet combustion analysis.
Neuro-MoBRE: Exploring Multi-subject Multi-task Intracranial Decoding via Explicit Heterogeneity Resolving
Aug 06, 2025Neurophysiological decoding, fundamental to advancing brain-computer interface (BCI) technologies, has significantly benefited from recent advances in deep learning. However, existing decoding approaches largely remain constrained to single-task scenarios and individual subjects, limiting their broader applicability and generalizability. Efforts towards creating large-scale neurophysiological foundation models have shown promise, but continue to struggle with significant challenges due to pervasive data heterogeneity across subjects and decoding tasks. Simply increasing model parameters and dataset size without explicitly addressing this heterogeneity fails to replicate the scaling successes seen in natural language processing. Here, we introduce the Neural Mixture of Brain Regional Experts (Neuro-MoBRE), a general-purpose decoding framework explicitly designed to manage the ubiquitous data heterogeneity in neurophysiological modeling. Neuro-MoBRE incorporates a brain-regional-temporal embedding mechanism combined with a mixture-of-experts approach, assigning neural signals from distinct brain regions to specialized regional experts on a unified embedding basis, thus explicitly resolving both structural and functional heterogeneity. Additionally, our region-masked autoencoding pre-training strategy further enhances representational consistency among subjects, complemented by a task-disentangled information aggregation method tailored to effectively handle task-specific neural variations. Evaluations conducted on intracranial recordings from 11 subjects across five diverse tasks, including complex language decoding and epileptic seizure diagnosis, demonstrate that Neuro-MoBRE surpasses prior art and exhibits robust generalization for zero-shot decoding on unseen subjects.
Stop Line Aided Cooperative Positioning of Connected Vehicles
Dec 26, 2021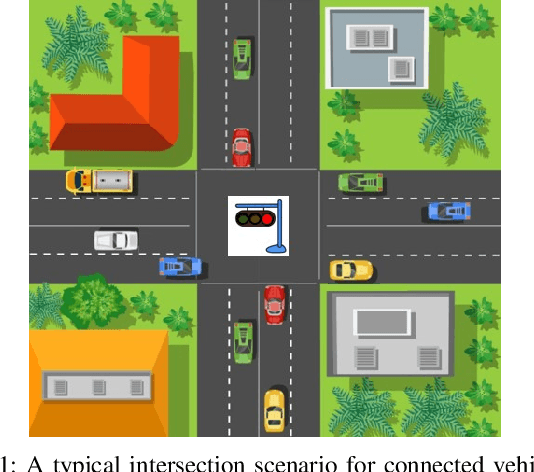
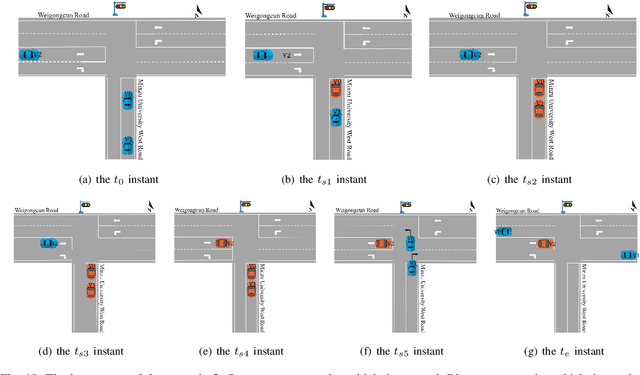
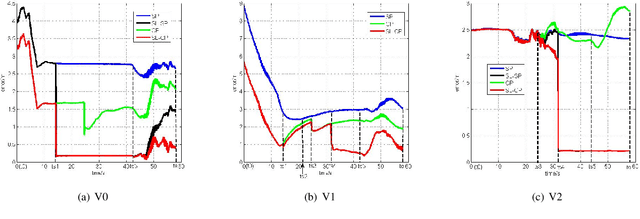
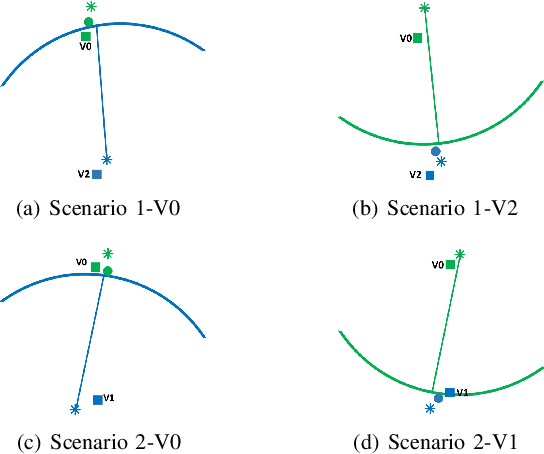
This paper develops a stop line aided cooperative positioning framework for connected vehicles, which creatively utilizes the location of the stop-line to achieve the positioning enhancement for a vehicular ad-hoc network (VANET) in intersection scenarios via Vehicle-to-Vehicle (V2V) communication. Firstly, a self-positioning correction scheme for the first stopped vehicle is presented, which applied the stop line information as benchmarks to correct the GNSS/INS positioning results. Then, the local observations of each vehicle are fused with the position estimates of other vehicles and the inter-vehicle distance measurements by using an extended Kalman filter (EKF). In this way, the benefits of the first stopped vehicle are extended to the whole VANET. Such a cooperative inertial navigation (CIN) framework can greatly improve the positioning performance of the VANET. Finally, experiments in Beijing show the effectiveness of the proposed stop line aided cooperative positioning framework.