 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEVIT: Event-based Visual-Inertial Tracking in Semi-Dense Maps Using Windowed Nonlinear Optimization
Aug 02, 2024Event cameras are an interesting visual exteroceptive sensor that reacts to brightness changes rather than integrating absolute image intensities. Owing to this design, the sensor exhibits strong performance in situations of challenging dynamics and illumination conditions. While event-based simultaneous tracking and mapping remains a challenging problem, a number of recent works have pointed out the sensor's suitability for prior map-based tracking. By making use of cross-modal registration paradigms, the camera's ego-motion can be tracked across a large spectrum of illumination and dynamics conditions on top of accurate maps that have been created a priori by more traditional sensors. The present paper follows up on a recently introduced event-based geometric semi-dense tracking paradigm, and proposes the addition of inertial signals in order to robustify the estimation. More specifically, the added signals provide strong cues for pose initialization as well as regularization during windowed, multi-frame tracking. As a result, the proposed framework achieves increased performance under challenging illumination conditions as well as a reduction of the rate at which intermediate event representations need to be registered in order to maintain stable tracking across highly dynamic sequences. Our evaluation focuses on a diverse set of real world sequences and comprises a comparison of our proposed method against a purely event-based alternative running at different rates.
Cross-Modal Semi-Dense 6-DoF Tracking of an Event Camera in Challenging Conditions
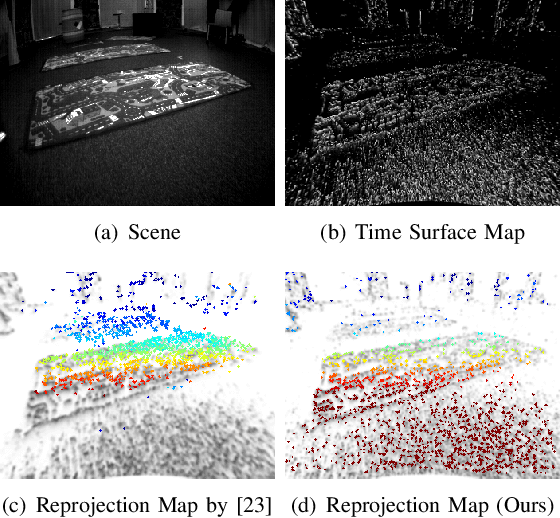
Jan 16, 2024Vision-based localization is a cost-effective and thus attractive solution for many intelligent mobile platforms. However, its accuracy and especially robustness still suffer from low illumination conditions, illumination changes, and aggressive motion. Event-based cameras are bio-inspired visual sensors that perform well in HDR conditions and have high temporal resolution, and thus provide an interesting alternative in such challenging scenarios. While purely event-based solutions currently do not yet produce satisfying mapping results, the present work demonstrates the feasibility of purely event-based tracking if an alternative sensor is permitted for mapping. The method relies on geometric 3D-2D registration of semi-dense maps and events, and achieves highly reliable and accurate cross-modal tracking results. Practically relevant scenarios are given by depth camera-supported tracking or map-based localization with a semi-dense map prior created by a regular image-based visual SLAM or structure-from-motion system. Conventional edge-based 3D-2D alignment is extended by a novel polarity-aware registration that makes use of signed time-surface maps (STSM) obtained from event streams. We furthermore introduce a novel culling strategy for occluded points. Both modifications increase the speed of the tracker and its robustness against occlusions or large view-point variations. The approach is validated on many real datasets covering the above-mentioned challenging conditions, and compared against similar solutions realised with regular cameras.
DEVO: Depth-Event Camera Visual Odometry in Challenging Conditions
Feb 05, 2022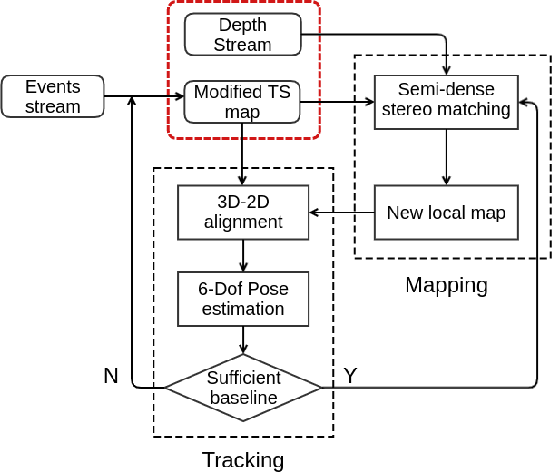
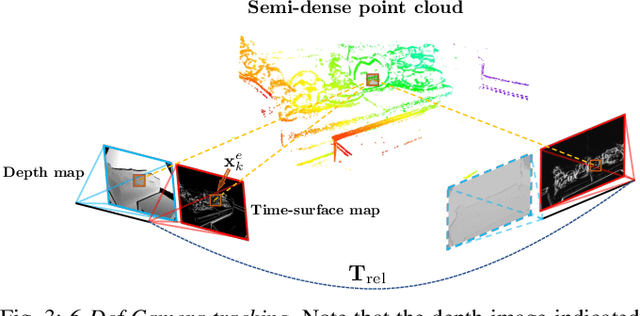
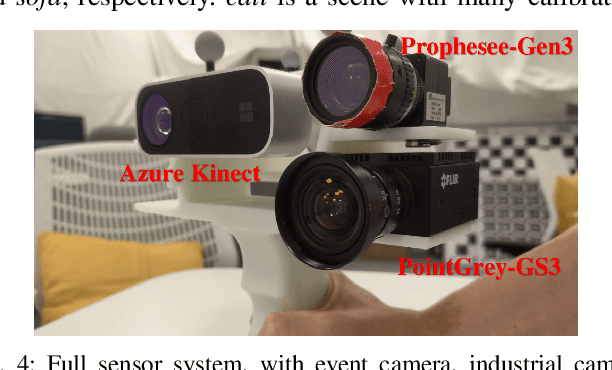
We present a novel real-time visual odometry framework for a stereo setup of a depth and high-resolution event camera. Our framework balances accuracy and robustness against computational efficiency towards strong performance in challenging scenarios. We extend conventional edge-based semi-dense visual odometry towards time-surface maps obtained from event streams. Semi-dense depth maps are generated by warping the corresponding depth values of the extrinsically calibrated depth camera. The tracking module updates the camera pose through efficient, geometric semi-dense 3D-2D edge alignment. Our approach is validated on both public and self-collected datasets captured under various conditions. We show that the proposed method performs comparable to state-of-the-art RGB-D camera-based alternatives in regular conditions, and eventually outperforms in challenging conditions such as high dynamics or low illumination.