 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical, Model-Based System for High-Performance Humanoid Soccer
Dec 10, 2025



The development of athletic humanoid robots has gained significant attention as advances in actuation, sensing, and control enable increasingly dynamic, real-world capabilities. RoboCup, an international competition of fully autonomous humanoid robots, provides a uniquely challenging benchmark for such systems, culminating in the long-term goal of competing against human soccer players by 2050. This paper presents the hardware and software innovations underlying our team's victory in the RoboCup 2024 Adult-Sized Humanoid Soccer Competition. On the hardware side, we introduce an adult-sized humanoid platform built with lightweight structural components, high-torque quasi-direct-drive actuators, and a specialized foot design that enables powerful in-gait kicks while preserving locomotion robustness. On the software side, we develop an integrated perception and localization framework that combines stereo vision, object detection, and landmark-based fusion to provide reliable estimates of the ball, goals, teammates, and opponents. A mid-level navigation stack then generates collision-aware, dynamically feasible trajectories, while a centralized behavior manager coordinates high-level decision making, role selection, and kick execution based on the evolving game state. The seamless integration of these subsystems results in fast, precise, and tactically effective gameplay, enabling robust performance under the dynamic and adversarial conditions of real matches. This paper presents the design principles, system architecture, and experimental results that contributed to ARTEMIS's success as the 2024 Adult-Sized Humanoid Soccer champion.
YORI: Autonomous Cooking System Utilizing a Modular Robotic Kitchen and a Dual-Arm Proprioceptive Manipulator
May 17, 2024



This article introduces the development and implementation of the Yummy Operations Robot Initiative (YORI), an innovative, autonomous robotic cooking system. YORI marks a major advancement in culinary automation, adept at handling a diverse range of cooking tasks, capable of preparing multiple dishes simultaneously, and offering the flexibility to adapt to an extensive array of culinary activities. This versatility is achieved through the use of custom tools and appliances operated by a dual arm manipulator utilizing proprioceptive actuators. The use of proprioceptive actuators enables fast yet precise movements, while allowing for accurate force control and effectively mitigating the inevitable impacts encountered in cooking. These factors underscore this technology's boundless potential. A key to YORI's adaptability is its modular kitchen design, which allows for easy adaptations to accommodate a continuously increasing range of culinary tasks. This article provides a comprehensive look at YORI's design process, and highlights its role in revolutionizing the culinary world by enhancing efficiency, consistency, and versatility in food preparation.
Design of a Jumping Control Framework with Heuristic Landing for Bipedal Robots
Apr 02, 2023



Generating dynamic jumping motions on legged robots remains a challenging control problem as the full flight phase and large landing impact are expected. Compared to quadrupedal robots or other multi-legged robots, bipedal robots place higher requirements for the control strategy given a much smaller footprint. To solve this problem, a novel heuristic landing planner is proposed in this paper. With the momentum feedback during the flight phase, landing locations can be updated to minimize the influence of uncertainties from tracking errors or external disturbances when landing. To the best of our knowledge, this is the first approach to take advantage of the flight phase to reduce the impact of the jump landing which is implemented in the actual robot. By integrating it with a modified kino-dynamics motion planner with centroidal momentum and a low-level controller which explores the whole-body dynamics to hierarchically handle multiple tasks, a complete and versatile jumping control framework is designed in this paper. Extensive results of simulation and hardware jumping experiments on a miniature bipedal robot with proprioceptive actuation are provided to demonstrate that the proposed framework is able to achieve human-like efficient and robust jumping tasks, including directional jump, twisting jump, step jump, and somersaults.
Feasibility Study of LIMMS, A Multi-Agent Modular Robotic Delivery System with Various Locomotion and Manipulation Modes
Aug 24, 2022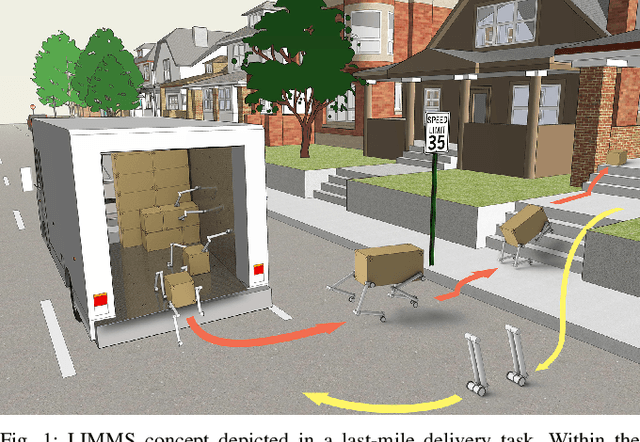
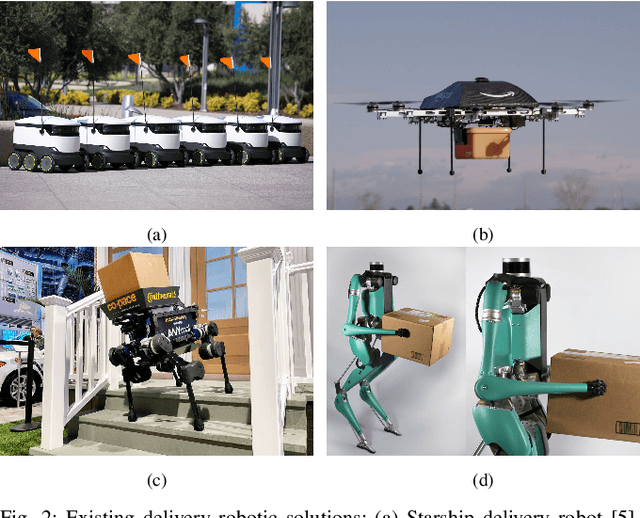
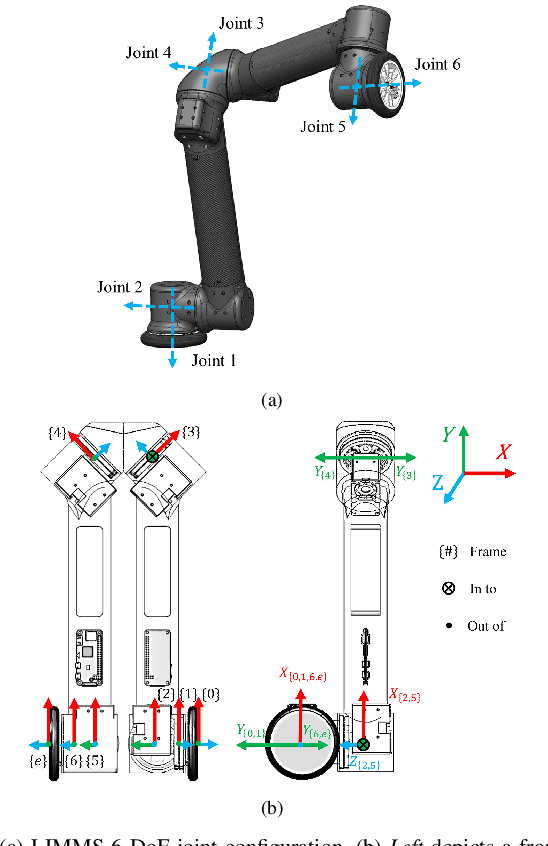
The logistics of transporting a package from a storage facility to the consumer's front door usually employs highly specialized robots often times splitting sub-tasks up to different systems, e.g., manipulator arms to sort and wheeled vehicles to deliver. More recent endeavors attempt to have a unified approach with legged and humanoid robots. These solutions, however, occupy large amounts of space thus reducing the number of packages that can fit into a delivery vehicle. As a result, these bulky robotic systems often reduce the potential for scalability and task parallelization. In this paper, we introduce LIMMS (Latching Intelligent Modular Mobility System) to address both the manipulation and delivery portion of a typical last-mile delivery while maintaining a minimal spatial footprint. LIMMS is a symmetrically designed, 6 degree of freedom (DoF) appendage-like robot with wheels and latching mechanisms at both ends. By latching onto a surface and anchoring at one end, LIMMS can function as a traditional 6-DoF manipulator arm. On the other hand, multiple LIMMS can latch onto a single box and behave like a legged robotic system where the package is the body. During transit, LIMMS folds up compactly and takes up much less space compared to traditional robotic systems. A large group of LIMMS units can fit inside of a single delivery vehicle, opening the potential for new delivery optimization and hybrid planning methods never done before. In this paper, the feasibility of LIMMS is studied and presented using a hardware prototype as well as simulation results for a range of sub-tasks in a typical last-mile delivery.
Multi-Modal Multi-Agent Optimization for LIMMS, A Modular Robotics Approach to Delivery Automation
Jul 31, 2022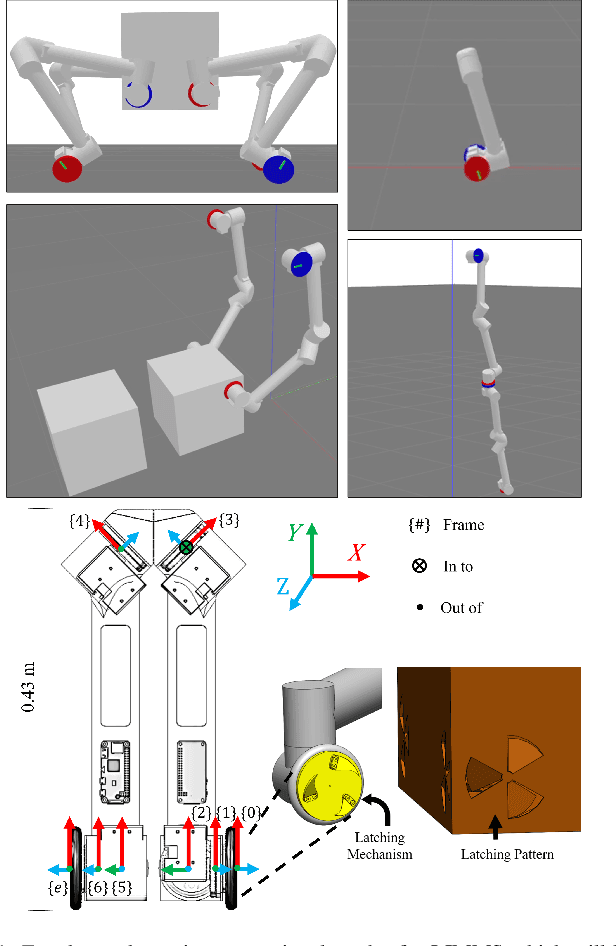
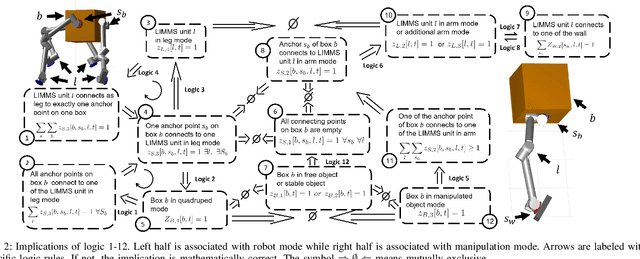
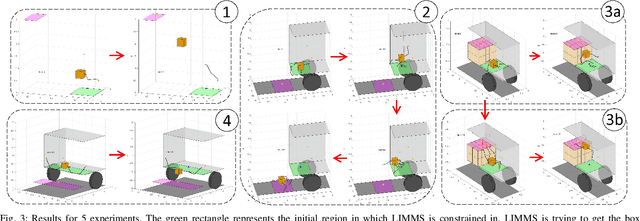
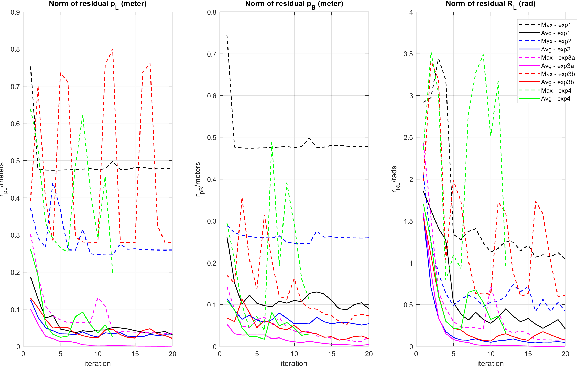
In this paper we present a motion planner for LIMMS, a modular multi-agent, multi-modal package delivery platform. A single LIMMS unit is a robot that can operate as an arm or leg depending on how and what it is attached to, e.g., a manipulator when it is anchored to walls within a delivery vehicle or a quadruped robot when 4 are attached to a box. Coordinating amongst multiple LIMMS, when each one can take on vastly different roles, can quickly become complex. For such a planning problem we first compose the necessary logic and constraints. The formulation is then solved for skill exploration and can be implemented on hardware after refinement. To solve this optimization problem we use alternating direction method of multipliers (ADMM). The proposed planner is experimented under various scenarios which shows the capability of LIMMS to enter into different modes or combinations of them to achieve their goal of moving shipping boxes.