 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage-Domain Tilt Constrained Distributed Fusion for Maneuvering UAV Tracking with Multi-Camera Electro-Optical Observations
Jul 01, 2026Short-horizon prediction is essential for electro-optical UAV tracking, especially when the target is small, maneuvering, or intermittently observed. Image center, line-of-sight, and range measurements provide direct constraints on target position, but their constraints on acceleration are weak. As a result, prediction can lag during aggressive maneuvers. This paper proposes an image-domain tilt constrained distributed fusion method for maneuvering UAV tracking. The method uses the apparent roll and pitch of a rotorcraft target in the image as low-level maneuver cues. A weak-prior auto-labeling pipeline first generates oriented bounding box and image-domain tilt labels from synchronized video, gimbal IMU, and UAV IMU data. A YOLO-OBB detector is then trained to provide online target position and tilt measurements. The front-end Python implementation is publicly available at github.com/ShineMinxing/PythonYOLO. In the fusion stage, the UAV state is modeled by position, velocity, and acceleration. Image-domain roll and pitch are introduced as acceleration-related pseudo-observations. For distributed tracking, one mobile gimbal camera and two fixed ground cameras are fused asynchronously. Camera attitude error states are augmented into the filter to absorb extrinsic drift and cross-camera systematic inconsistency. A Mahalanobis gate with time-since-last-valid covariance widening is used to reject false detections and handle dropouts. In simulation, adding roll/pitch observations reduces the prediction RMSE from 1.991 m to 0.821 m and decreases the cumulative prediction error by 60.75\%. In real distributed experiments, a self-consistency evaluation shows an 18.10\% reduction in cumulative prediction error. The results show that image-domain tilt can provide useful acceleration constraints for robust short-horizon UAV prediction.
InEdit-Bench: Benchmarking Intermediate Logical Pathways for Intelligent Image Editing Models
Mar 04, 2026Multimodal generative models have made significant strides in image editing, demonstrating impressive performance on a variety of static tasks. However, their proficiency typically does not extend to complex scenarios requiring dynamic reasoning, leaving them ill-equipped to model the coherent, intermediate logical pathways that constitute a multi-step evolution from an initial state to a final one. This capacity is crucial for unlocking a deeper level of procedural and causal understanding in visual manipulation. To systematically measure this critical limitation, we introduce InEdit-Bench, the first evaluation benchmark dedicated to reasoning over intermediate pathways in image editing. InEdit-Bench comprises meticulously annotated test cases covering four fundamental task categories: state transition, dynamic process, temporal sequence, and scientific simulation. Additionally, to enable fine-grained evaluation, we propose a set of assessment criteria to evaluate the logical coherence and visual naturalness of the generated pathways, as well as the model's fidelity to specified path constraints. Our comprehensive evaluation of 14 representative image editing models on InEdit-Bench reveals significant and widespread shortcomings in this domain. By providing a standardized and challenging benchmark, we aim for InEdit-Bench to catalyze research and steer development towards more dynamic, reason-aware, and intelligent multimodal generative models.
Contact-Anchored Proprioceptive Odometry for Quadruped Robots
Feb 19, 2026Reliable odometry for legged robots without cameras or LiDAR remains challenging due to IMU drift and noisy joint velocity sensing. This paper presents a purely proprioceptive state estimator that uses only IMU and motor measurements to jointly estimate body pose and velocity, with a unified formulation applicable to biped, quadruped, and wheel-legged robots. The key idea is to treat each contacting leg as a kinematic anchor: joint-torque--based foot wrench estimation selects reliable contacts, and the corresponding footfall positions provide intermittent world-frame constraints that suppress long-term drift. To prevent elevation drift during extended traversal, we introduce a lightweight height clustering and time-decay correction that snaps newly recorded footfall heights to previously observed support planes. To improve foot velocity observations under encoder quantization, we apply an inverse-kinematics cubature Kalman filter that directly filters foot-end velocities from joint angles and velocities. The implementation further mitigates yaw drift through multi-contact geometric consistency and degrades gracefully to a kinematics-derived heading reference when IMU yaw constraints are unavailable or unreliable. We evaluate the method on four quadruped platforms (three Astrall robots and a Unitree Go2 EDU) using closed-loop trajectories. On Astrall point-foot robot~A, a $\sim$200\,m horizontal loop and a $\sim$15\,m vertical loop return with 0.1638\,m and 0.219\,m error, respectively; on wheel-legged robot~B, the corresponding errors are 0.2264\,m and 0.199\,m. On wheel-legged robot~C, a $\sim$700\,m horizontal loop yields 7.68\,m error and a $\sim$20\,m vertical loop yields 0.540\,m error. Unitree Go2 EDU closes a $\sim$120\,m horizontal loop with 2.2138\,m error and a $\sim$8\,m vertical loop with less than 0.1\,m vertical error. github.com/ShineMinxing/Ros2Go2Estimator.git
DIFNet: Decentralized Information Filtering Fusion Neural Network with Unknown Correlation in Sensor Measurement Noises
Aug 26, 2025



In recent years, decentralized sensor networks have garnered significant attention in the field of state estimation owing to enhanced robustness, scalability, and fault tolerance. Optimal fusion performance can be achieved under fully connected communication and known noise correlation structures. To mitigate communication overhead, the global state estimation problem is decomposed into local subproblems through structured observation model. This ensures that even when the communication network is not fully connected, each sensor can achieve locally optimal estimates of its observable state components. To address the degradation of fusion accuracy induced by unknown correlations in measurement noise, this paper proposes a data-driven method, termed Decentralized Information Filter Neural Network (DIFNet), to learn unknown noise correlations in data for discrete-time nonlinear state space models with cross-correlated measurement noises. Numerical simulations demonstrate that DIFNet achieves superior fusion performance compared to conventional filtering methods and exhibits robust characteristics in more complex scenarios, such as the presence of time-varying noise. The source code used in our numerical experiment can be found online at https://wisdom-estimation.github.io/DIFNet_Demonstrate/.
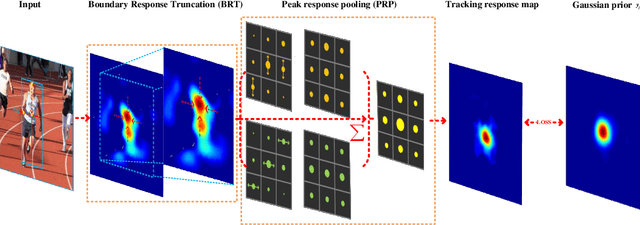
SPSTracker: Sub-Peak Suppression of Response Map for Robust Object Tracking
Jan 24, 2020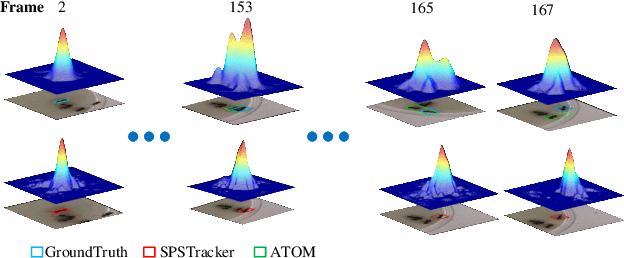
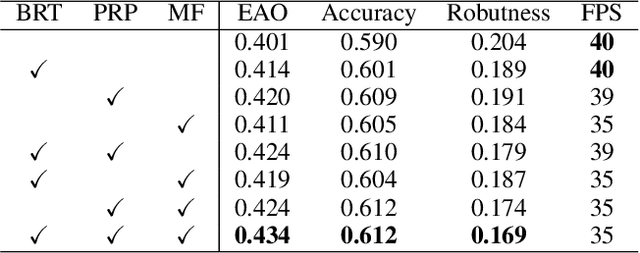
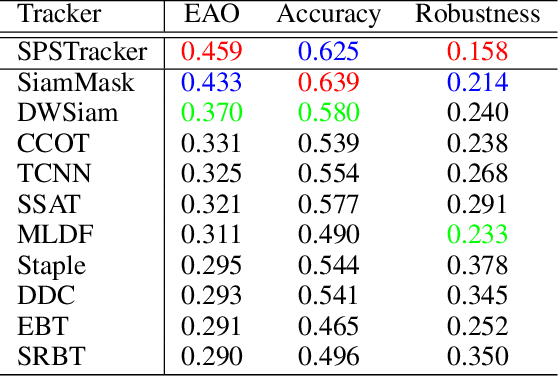
I'm sorry, Table2,3(VOT2016,2018) do not match figure6,7(VOT2016,2018).More experiments need to be added. However, this replacement version may take a lot of time, because a lot of experiments need to be done again, and now because of the Chinese Spring Festival and the 2019 novel coronavirus (2019-nCoV) can't do experiments, in order to ensure the rigor of the paper, I applied to withdraw the manuscript, and then resubmit it after the replacement version.