 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dual-Dip Heterogeneous LPFG Sensing System via Annealing under Bending with Temperature and Humidity Compensation
May 10, 2026Optical fiber multi parameter sensing is fundamentally constrained by cross-sensitivity and the complexity of multi sensor integration. Here, we present a dual-dip heterogeneous long-period fiber grating (LPFG) sensing platform enabled by bending assisted annealing, which introduces anisotropic refractive index redistribution and mode dependent coupling enhancement. This process yields enhanced sensitivity, improved dip contrast, and opposite spectral responses between dual resonance dips, providing intrinsic spectral heterogeneity. To overcome temperature cross sensitivity, a polymer-encapsulated cascaded LPFG-FBG architecture is developed, where the LPFG serves as the microbending sensitive element and the FBG acts as a reference channel. PDMS encapsulation enhances stress transfer and suppresses interfacial slippage, improving linearity and repeatability. As a result, the bending sensitivity increases from -3.44 to -8.97 nm per cm, and the detection limit improves from 0.017 to 0.006 cm. Building on this, a multi parameter sensing paradigm is established by integrating dual dip heterogeneity with LPFGFBG spectral orthogonality. With PAAm functionalization, the platform enables simultaneous and decoupled sensing of temperature, bending, and humidity, demonstrating scalable and versatile multi parameter capability. Overall, this work establishes a minimalistic yet robust paradigm for multi-parameter fiber-optic sensing, offering a scalable strategy for high-performance sensing in structural health monitoring and harsh environments.
Semantic Search At LinkedIn
Feb 07, 2026Semantic search with large language models (LLMs) enables retrieval by meaning rather than keyword overlap, but scaling it requires major inference efficiency advances. We present LinkedIn's LLM-based semantic search framework for AI Job Search and AI People Search, combining an LLM relevance judge, embedding-based retrieval, and a compact Small Language Model trained via multi-teacher distillation to jointly optimize relevance and engagement. A prefill-oriented inference architecture co-designed with model pruning, context compression, and text-embedding hybrid interactions boosts ranking throughput by over 75x under a fixed latency constraint while preserving near-teacher-level NDCG, enabling one of the first production LLM-based ranking systems with efficiency comparable to traditional approaches and delivering significant gains in quality and user engagement.
Asymptotically Optimal Sampling-based Kinodynamic Planning
Feb 05, 2016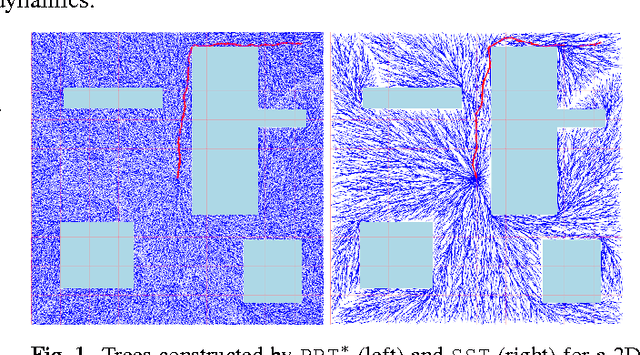
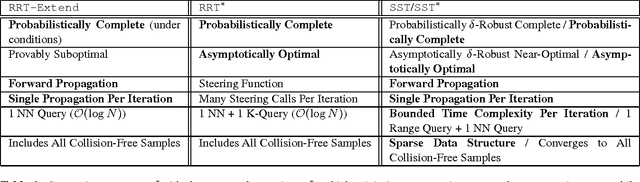
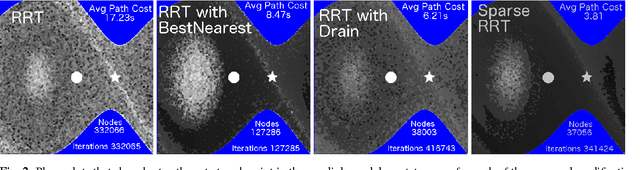
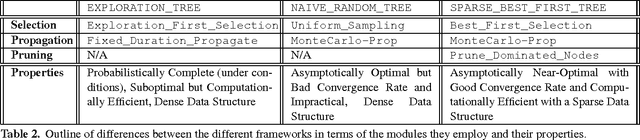
Sampling-based algorithms are viewed as practical solutions for high-dimensional motion planning. Recent progress has taken advantage of random geometric graph theory to show how asymptotic optimality can also be achieved with these methods. Achieving this desirable property for systems with dynamics requires solving a two-point boundary value problem (BVP) in the state space of the underlying dynamical system. It is difficult, however, if not impractical, to generate a BVP solver for a variety of important dynamical models of robots or physically simulated ones. Thus, an open challenge was whether it was even possible to achieve optimality guarantees when planning for systems without access to a BVP solver. This work resolves the above question and describes how to achieve asymptotic optimality for kinodynamic planning using incremental sampling-based planners by introducing a new rigorous framework. Two new methods, Stable Sparse-RRT (SST) and SST*, result from this analysis, which are asymptotically near-optimal and optimal, respectively. The techniques are shown to converge fast to high-quality paths, while they maintain only a sparse set of samples, which makes them computationally efficient. The good performance of the planners is confirmed by experimental results using dynamical systems benchmarks, as well as physically simulated robots.