 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCAN: Sparse Circuit Anchor Interpretable Neuron for Lifelong Knowledge Editing
Mar 16, 2026Large Language Models (LLMs) often suffer from catastrophic forgetting and collapse during sequential knowledge editing. This vulnerability stems from the prevailing dense editing paradigm, which treats models as black boxes and relies on coarse-grained parameter interventions that inevitably disrupt preserved knowledge. To address this, we propose SCAN (a sparse editing framework based on Sparse Circuit Anchored Neuron) which transforms editing into a mechanism-aware manipulation by constructing a knowledge circuit via Sparse Transcoders. Experiments on Gemma2, Qwen3, and Llama3.1 across CounterFact, ZsRE and WikiFactDiff demonstrate that SCAN achieves a superior performance, maintaining model integrity on benchmarks like MMLU and GSM8K even after 3,000 sequential edits, whereas other existing methods deteriorate progressively as editing accumulates, eventually resulting in model collapse.
Rethinking the Embodied Gap in Vision-and-Language Navigation: A Holistic Study of Physical and Visual Disparities
Jul 17, 2025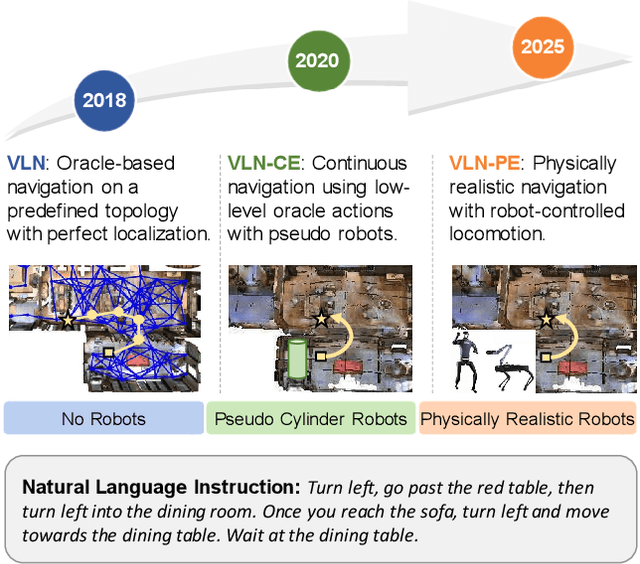
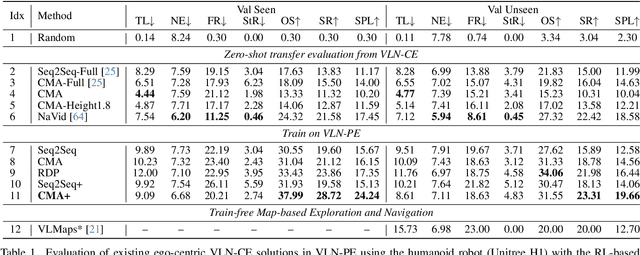
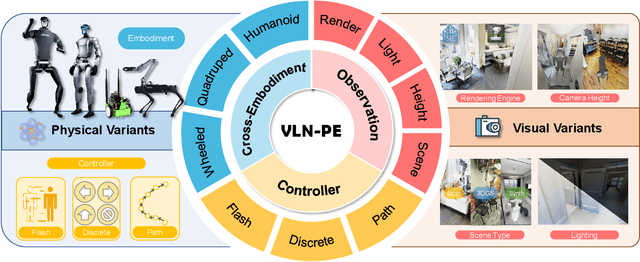

Recent Vision-and-Language Navigation (VLN) advancements are promising, but their idealized assumptions about robot movement and control fail to reflect physically embodied deployment challenges. To bridge this gap, we introduce VLN-PE, a physically realistic VLN platform supporting humanoid, quadruped, and wheeled robots. For the first time, we systematically evaluate several ego-centric VLN methods in physical robotic settings across different technical pipelines, including classification models for single-step discrete action prediction, a diffusion model for dense waypoint prediction, and a train-free, map-based large language model (LLM) integrated with path planning. Our results reveal significant performance degradation due to limited robot observation space, environmental lighting variations, and physical challenges like collisions and falls. This also exposes locomotion constraints for legged robots in complex environments. VLN-PE is highly extensible, allowing seamless integration of new scenes beyond MP3D, thereby enabling more comprehensive VLN evaluation. Despite the weak generalization of current models in physical deployment, VLN-PE provides a new pathway for improving cross-embodiment's overall adaptability. We hope our findings and tools inspire the community to rethink VLN limitations and advance robust, practical VLN models. The code is available at https://crystalsixone.github.io/vln_pe.github.io/.
WereWolf-Plus: An Update of Werewolf Game setting Based on DSGBench
Jun 15, 2025With the rapid development of LLM-based agents, increasing attention has been given to their social interaction and strategic reasoning capabilities. However, existing Werewolf-based benchmarking platforms suffer from overly simplified game settings, incomplete evaluation metrics, and poor scalability. To address these limitations, we propose WereWolf-Plus, a multi-model, multi-dimensional, and multi-method benchmarking platform for evaluating multi-agent strategic reasoning in the Werewolf game. The platform offers strong extensibility, supporting customizable configurations for roles such as Seer, Witch, Hunter, Guard, and Sheriff, along with flexible model assignment and reasoning enhancement strategies for different roles. In addition, we introduce a comprehensive set of quantitative evaluation metrics for all special roles, werewolves, and the sheriff, and enrich the assessment dimensions for agent reasoning ability, cooperation capacity, and social influence. WereWolf-Plus provides a more flexible and reliable environment for advancing research on inference and strategic interaction within multi-agent communities. Our code is open sourced at https://github.com/MinstrelsyXia/WereWolfPlus.