 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIRAM-Omega-Q: A Computational Architecture for Uncertainty Regulation in Artificial Agents
Mar 16, 2026Artificial agents can achieve strong task performance while remaining opaque with respect to internal regulation, uncertainty management, and stability under stochastic perturbation. We present IRAM-Omega-Q, a computational architecture that models internal regulation as closed-loop control over a quantum-like state representation. The framework uses density matrices instrumentally as abstract state descriptors, enabling direct computation of entropy, purity, and coherence-related metrics without invoking physical quantum processes. A central adaptive gain is updated continuously to maintain a target uncertainty regime under noise. Using systematic parameter sweeps, fixed-seed publication-mode simulations, and susceptibility-based phase-diagram analysis, we identify reproducible critical boundaries in regulation-noise space. We further show that alternative control update orderings, interpreted as perception-first and action-first architectures, induce distinct stability regimes under identical external conditions. These results support uncertainty regulation as a concrete architectural principle for artificial agents and provide a formal setting for studying stability, control, and order effects in cognitively inspired AI systems. The framework is presented as a technical model of adaptive regulation dynamics in artificial agents. It makes no claims regarding phenomenological consciousness, and the quantum-like formalism is used strictly as a mathematical representation for structured uncertainty and state evolution.
Artificial Intelligence and Machine Learning in Nuclear Physics
Dec 04, 2021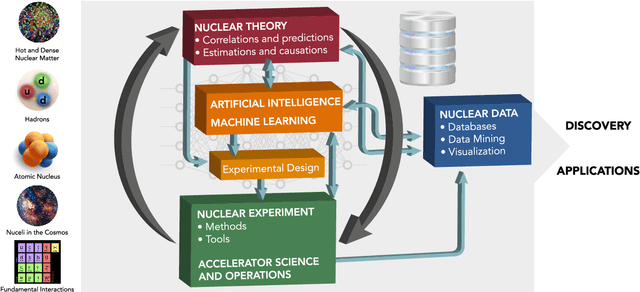
Advances in artificial intelligence/machine learning methods provide tools that have broad applicability in scientific research. These techniques are being applied across the diversity of nuclear physics research topics, leading to advances that will facilitate scientific discoveries and societal applications. This Review gives a snapshot of nuclear physics research which has been transformed by artificial intelligence and machine learning techniques.
Using Artificial Intelligence for Particle Track Identification in CLAS12 Detector
Aug 28, 2020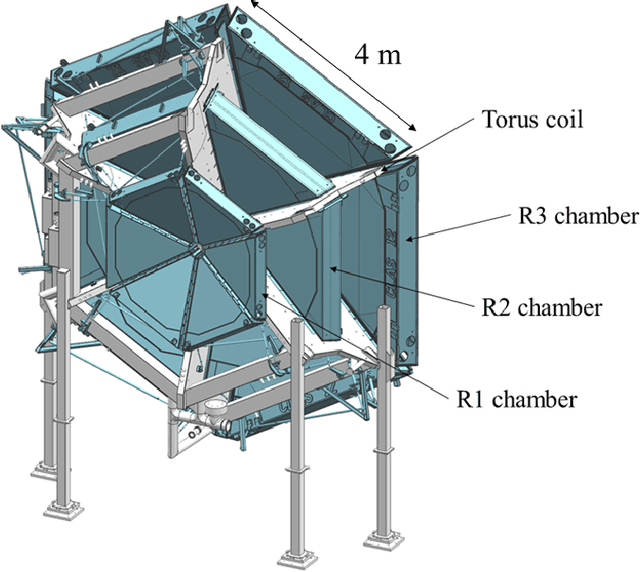
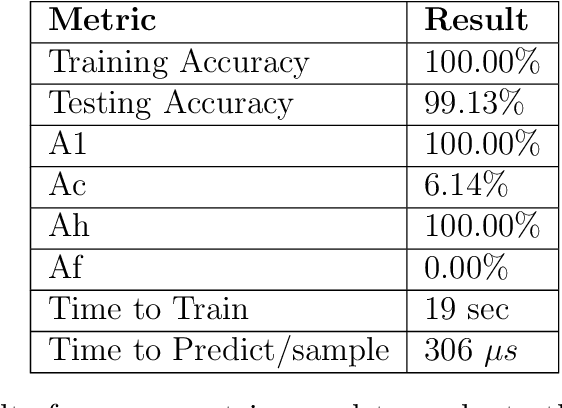
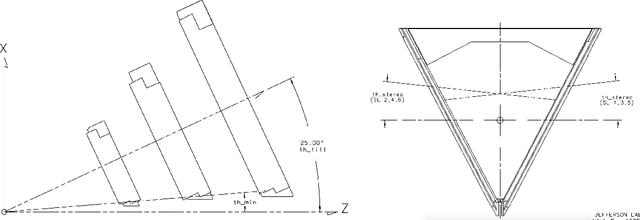

In this article we describe the development of machine learning models to assist the CLAS12 tracking algorithm by identifying the best track candidates from combinatorial track candidates from the hits in drift chambers. Several types of machine learning models were tested, including: Convolutional Neural Networks (CNN), Multi-Layer Perceptron (MLP) and Extremely Randomized Trees (ERT). The final implementation was based on an MLP network and provided an accuracy $>99\%$. The implementation of AI assisted tracking into the CLAS12 reconstruction workflow and provided a 6 times code speedup.