 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRDD: Robust Feature Detector and Descriptor using Deformable Transformer
May 12, 2025



As a core step in structure-from-motion and SLAM, robust feature detection and description under challenging scenarios such as significant viewpoint changes remain unresolved despite their ubiquity. While recent works have identified the importance of local features in modeling geometric transformations, these methods fail to learn the visual cues present in long-range relationships. We present Robust Deformable Detector (RDD), a novel and robust keypoint detector/descriptor leveraging the deformable transformer, which captures global context and geometric invariance through deformable self-attention mechanisms. Specifically, we observed that deformable attention focuses on key locations, effectively reducing the search space complexity and modeling the geometric invariance. Furthermore, we collected an Air-to-Ground dataset for training in addition to the standard MegaDepth dataset. Our proposed method outperforms all state-of-the-art keypoint detection/description methods in sparse matching tasks and is also capable of semi-dense matching. To ensure comprehensive evaluation, we introduce two challenging benchmarks: one emphasizing large viewpoint and scale variations, and the other being an Air-to-Ground benchmark -- an evaluation setting that has recently gaining popularity for 3D reconstruction across different altitudes.
AutoLoss-Zero: Searching Loss Functions from Scratch for Generic Tasks
Mar 25, 2021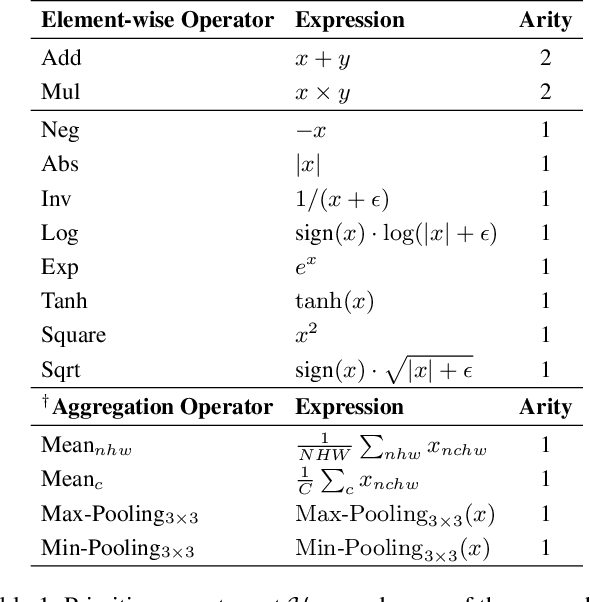
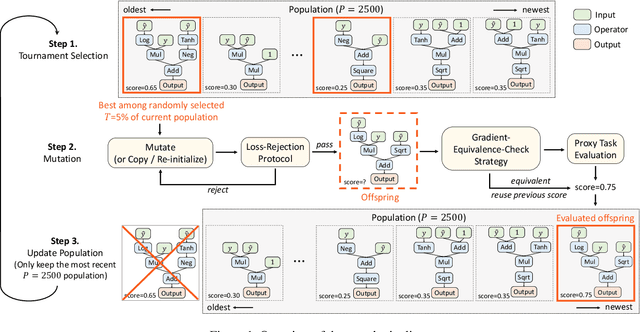
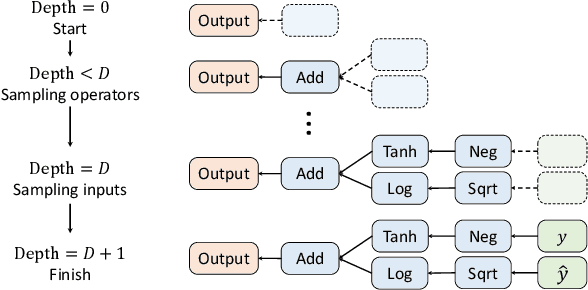
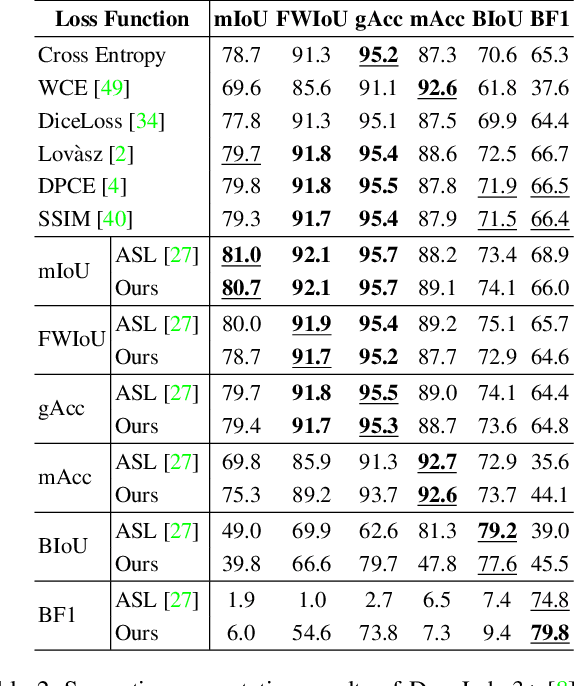
Significant progress has been achieved in automating the design of various components in deep networks. However, the automatic design of loss functions for generic tasks with various evaluation metrics remains under-investigated. Previous works on handcrafting loss functions heavily rely on human expertise, which limits their extendibility. Meanwhile, existing efforts on searching loss functions mainly focus on specific tasks and particular metrics, with task-specific heuristics. Whether such works can be extended to generic tasks is not verified and questionable. In this paper, we propose AutoLoss-Zero, the first general framework for searching loss functions from scratch for generic tasks. Specifically, we design an elementary search space composed only of primitive mathematical operators to accommodate the heterogeneous tasks and evaluation metrics. A variant of the evolutionary algorithm is employed to discover loss functions in the elementary search space. A loss-rejection protocol and a gradient-equivalence-check strategy are developed so as to improve the search efficiency, which are applicable to generic tasks. Extensive experiments on various computer vision tasks demonstrate that our searched loss functions are on par with or superior to existing loss functions, which generalize well to different datasets and networks. Code shall be released.