 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Matter of Time -- A General and Efficient System for Precise Sensor Synchronization in Robotic Computing
Mar 30, 2021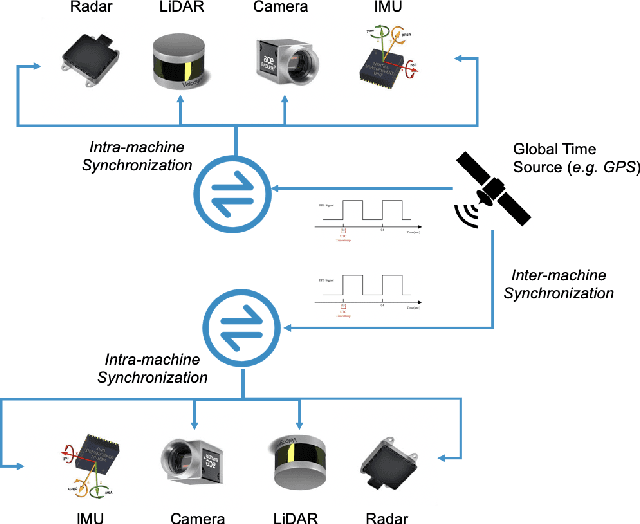
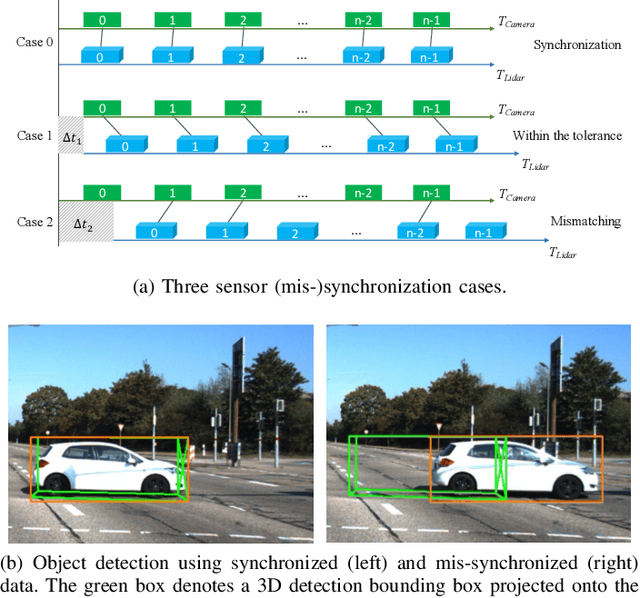
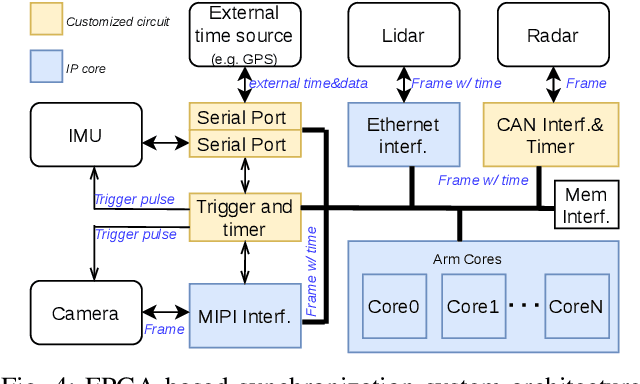
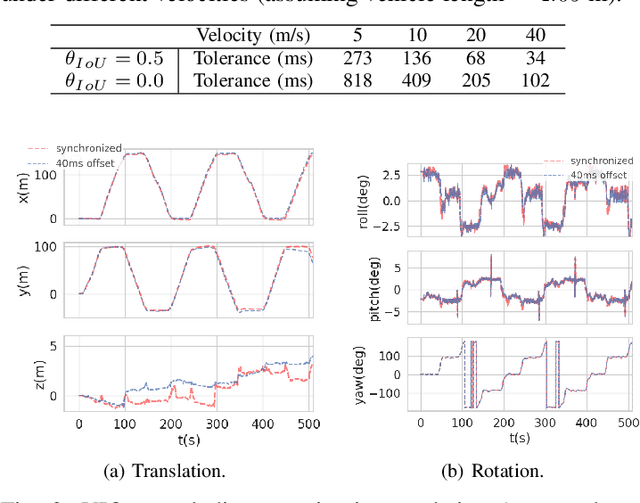
Time synchronization is a critical task in robotic computing such as autonomous driving. In the past few years, as we developed advanced robotic applications, our synchronization system has evolved as well. In this paper, we first introduce the time synchronization problem and explain the challenges of time synchronization, especially in robotic workloads. Summarizing these challenges, we then present a general hardware synchronization system for robotic computing, which delivers high synchronization accuracy while maintaining low energy and resource consumption. The proposed hardware synchronization system is a key building block in our future robotic products.
A Survey of FPGA-Based Robotic Computing
Sep 13, 2020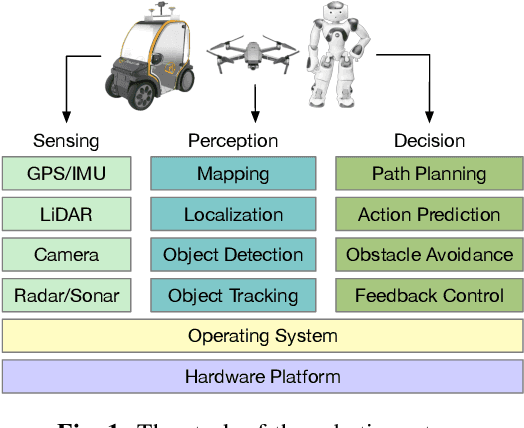
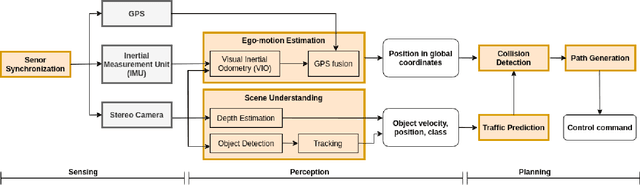
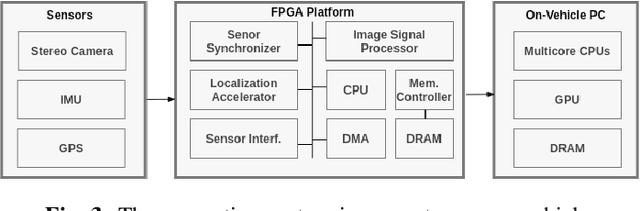
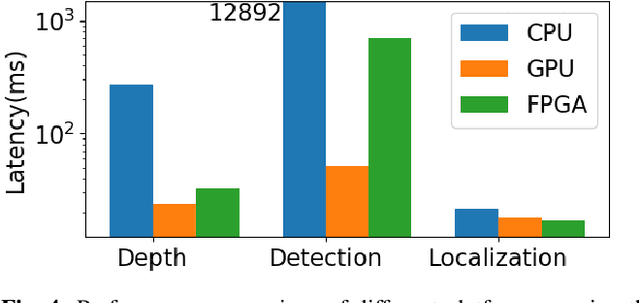
Recent researches on robotics have shown significant improvement, spanning from algorithms, mechanics to hardware architectures. Robotics, including manipulators, legged robots, drones, and autonomous vehicles, are now widely applied in diverse scenarios. However, the high computation and data complexity of robotic algorithms pose great challenges to its applications. On the one hand, CPU platform is flexible to handle multiple robotic tasks. GPU platform has higher computational capacities and easy-touse development frameworks, so they have been widely adopted in several applications. On the other hand, FPGA-based robotic accelerators are becoming increasingly competitive alternatives, especially in latency-critical and power-limited scenarios. With specialized designed hardware logic and algorithm kernels, FPGA-based accelerators can surpass CPU and GPU in performance and energy efficiency. In this paper, we give an overview of previous work on FPGA-based robotic accelerators covering different stages of the robotic system pipeline. An analysis of software and hardware optimization techniques and main technical issues is presented, along with some commercial and space applications, to serve as a guide for future work.
Enabling Commercial Autonomous Space Robotic Explorers
Aug 12, 2019
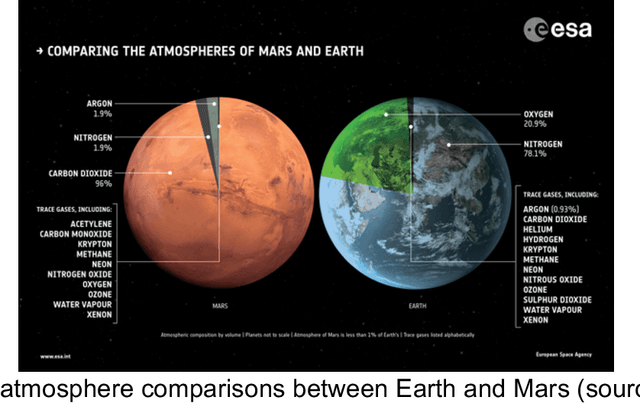
In contrast to manned missions, the application of autonomous robots for space exploration missions decreases the safety concerns of the exploration missions while extending the exploration distance since returning transportation is not necessary for robotics missions. In addition, the employment of robots in these missions also decreases mission complexities and costs because there is no need for onboard life support systems: robots can withstand and operate in harsh conditions, for instance, extreme temperature, pressure, and radiation, where humans cannot survive. In this article, we introduce environments on Mars, review the existing autonomous driving techniques deployed on Earth, as well as explore technologies required to enable future commercial autonomous space robotic explorers. Last but not least, we also present that one of the urgent technical challenges for autonomous space explorers, namely, computing power onboard.