 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReasoning on Grasp-Action Affordances
May 25, 2019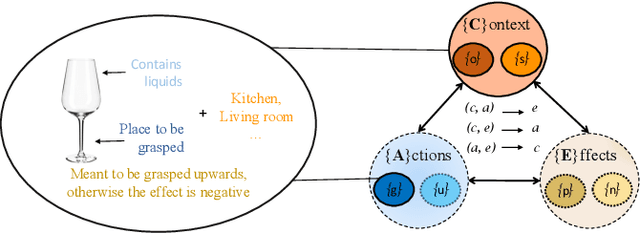
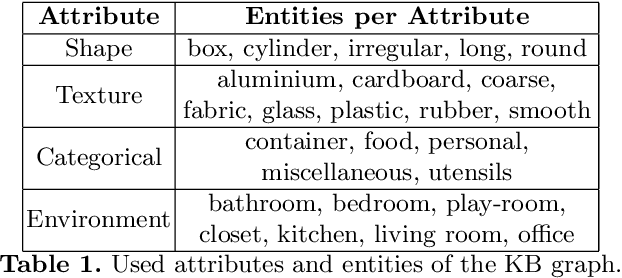
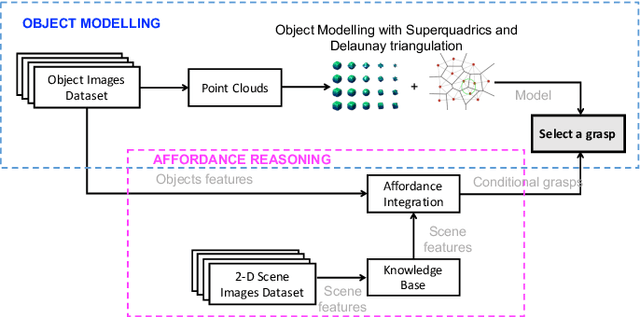
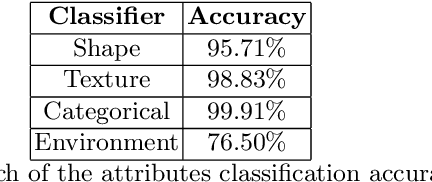
Artificial intelligence is essential to succeed in challenging activities that involve dynamic environments, such as object manipulation tasks in indoor scenes. Most of the state-of-the-art literature explores robotic grasping methods by focusing exclusively on attributes of the target object. When it comes to human perceptual learning approaches, these physical qualities are not only inferred from the object, but also from the characteristics of the surroundings. This work proposes a method that includes environmental context to reason on an object affordance to then deduce its grasping regions. This affordance is reasoned using a ranked association of visual semantic attributes harvested in a knowledge base graph representation. The framework is assessed using standard learning evaluation metrics and the zero-shot affordance prediction scenario. The resulting grasping areas are compared with unseen labelled data to asses their accuracy matching percentage. The outcome of this evaluation suggest the autonomy capabilities of the proposed method for object interaction applications in indoor environments.
An Empirical Evaluation of Adversarial Robustness under Transfer Learning
May 23, 2019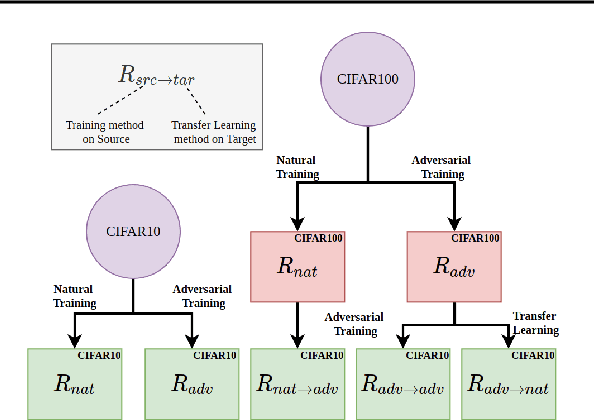
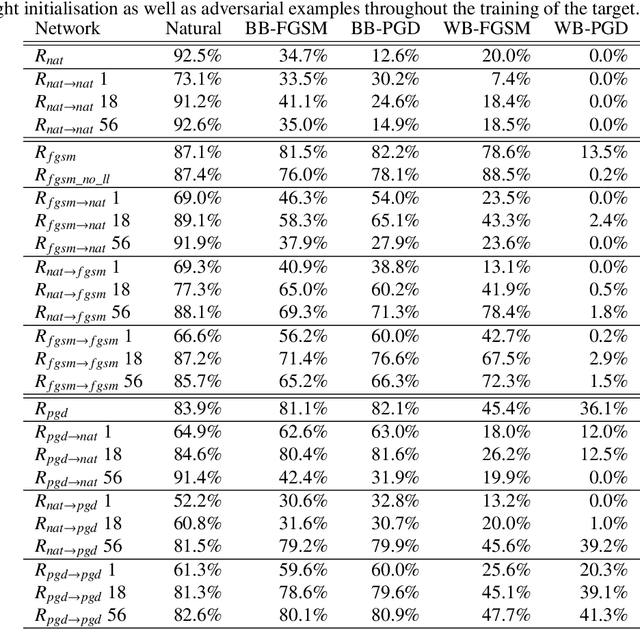
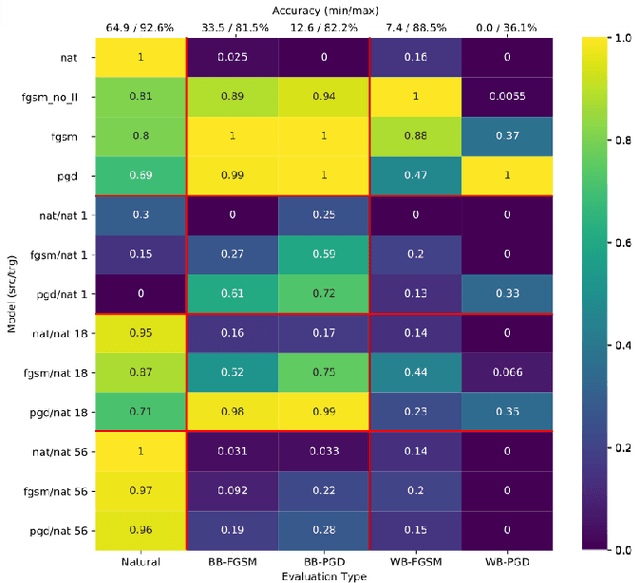
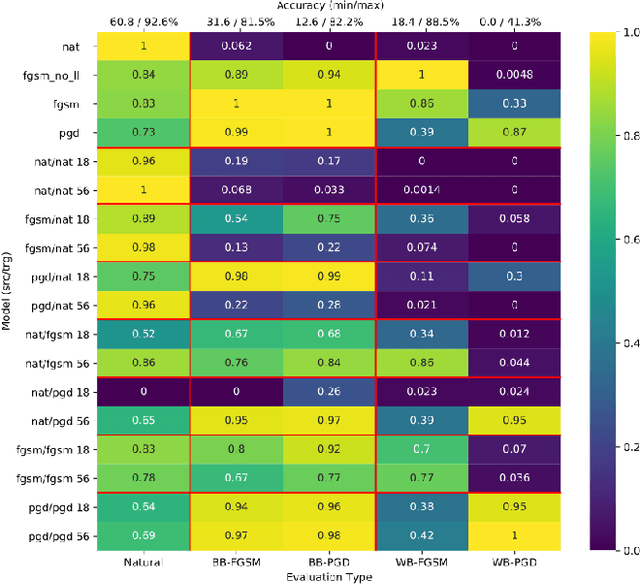
In this work, we evaluate adversarial robustness in the context of transfer learning from a source trained on CIFAR 100 to a target network trained on CIFAR 10. Specifically, we study the effects of using robust optimisation in the source and target networks. This allows us to identify transfer learning strategies under which adversarial defences are successfully retained, in addition to revealing potential vulnerabilities. We study the extent to which features learnt by a fast gradient sign method (FGSM) and its iterative alternative (PGD) can preserve their defence properties against black and white-box attacks under three different transfer learning strategies. We find that using PGD examples during training on the source task leads to more general robust features that are easier to transfer. Furthermore, under successful transfer, it achieves 5.2% more accuracy against white-box PGD attacks than suitable baselines. Overall, our empirical evaluations give insights on how well adversarial robustness under transfer learning can generalise.
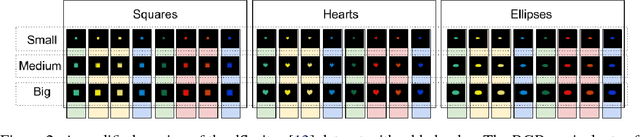
Learning Programmatically Structured Representations with Perceptor Gradients
May 02, 2019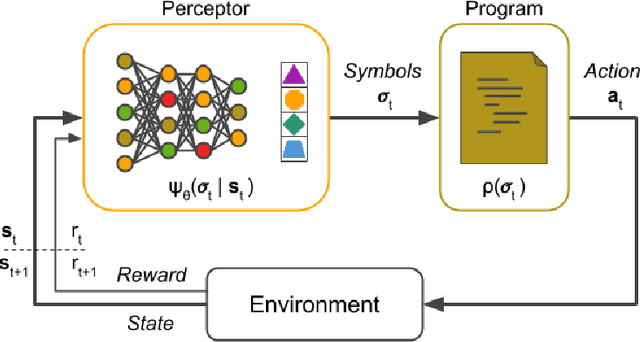
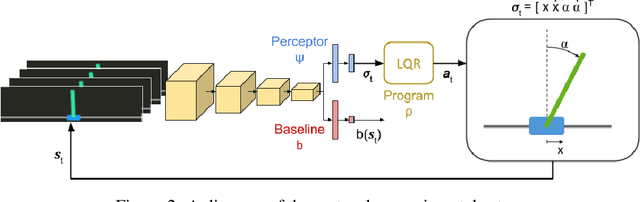
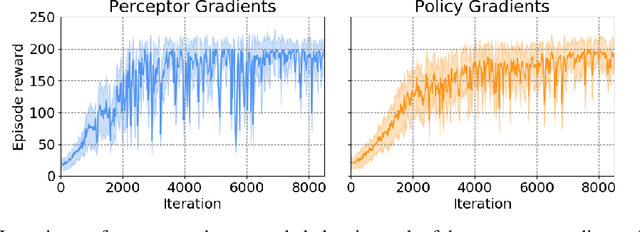
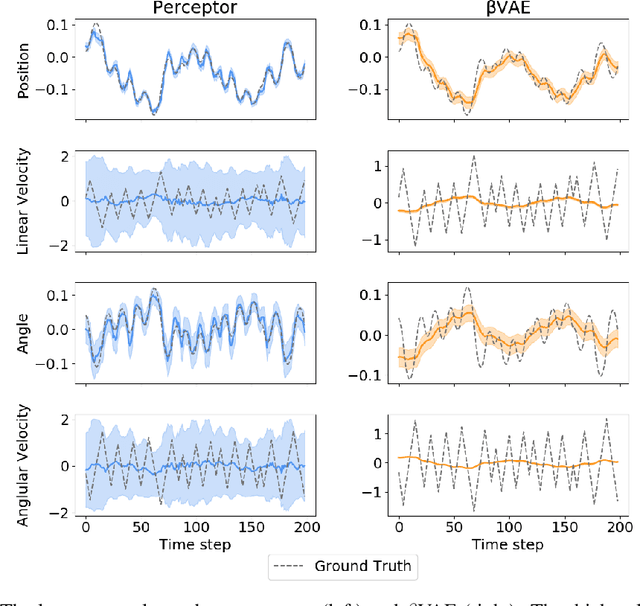
We present the perceptor gradients algorithm -- a novel approach to learning symbolic representations based on the idea of decomposing an agent's policy into i) a perceptor network extracting symbols from raw observation data and ii) a task encoding program which maps the input symbols to output actions. We show that the proposed algorithm is able to learn representations that can be directly fed into a Linear-Quadratic Regulator (LQR) or a general purpose A* planner. Our experimental results confirm that the perceptor gradients algorithm is able to efficiently learn transferable symbolic representations as well as generate new observations according to a semantically meaningful specification.
To Stir or Not to Stir: Online Estimation of Liquid Properties for Pouring Actions
Apr 04, 2019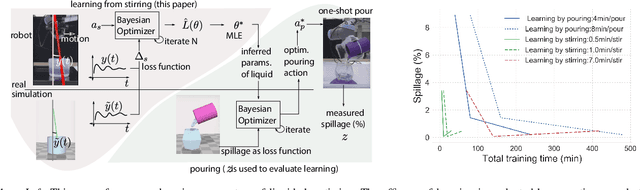
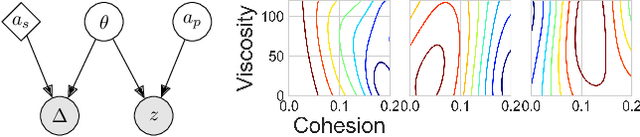
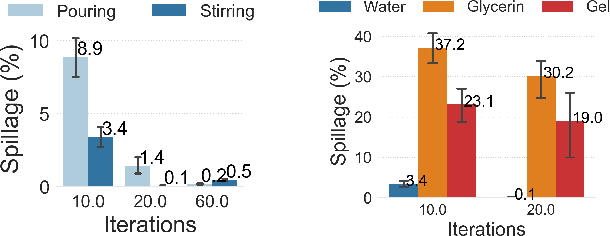
Our brains are able to exploit coarse physical models of fluids to solve everyday manipulation tasks. There has been considerable interest in developing such a capability in robots so that they can autonomously manipulate fluids adapting to different conditions. In this paper, we investigate the problem of adaptation to liquids with different characteristics. We develop a simple calibration task (stirring with a stick) that enables rapid inference of the parameters of the liquid from RBG data. We perform the inference in the space of simulation parameters rather than on physically accurate parameters. This facilitates prediction and optimization tasks since the inferred parameters may be fed directly to the simulator. We demonstrate that our "stirring" learner performs better than when the robot is calibrated with pouring actions. We show that our method is able to infer properties of three different liquids -- water, glycerin and gel -- and present experimental results by executing stirring and pouring actions on a UR10. We believe that decoupling of the training actions from the goal task is an important step towards simple, autonomous learning of the behavior of different fluids in unstructured environments.
Using Causal Analysis to Learn Specifications from Task Demonstrations
Mar 04, 2019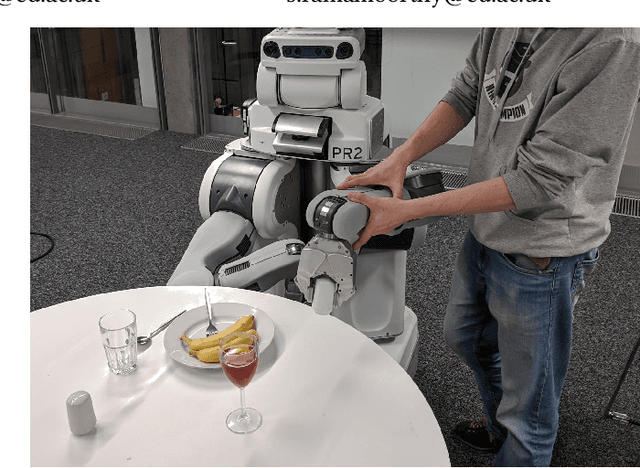
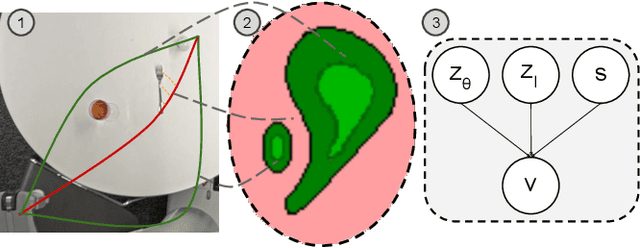
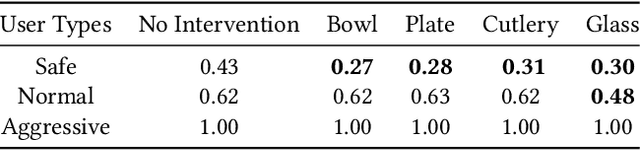
Learning models of user behaviour is an important problem that is broadly applicable across many application domains requiring human-robot interaction. In this work we show that it is possible to learn a generative model for distinct user behavioral types, extracted from human demonstrations, by enforcing clustering of preferred task solutions within the latent space. We use this model to differentiate between user types and to find cases with overlapping solutions. Moreover, we can alter an initially guessed solution to satisfy the preferences that constitute a particular user type by backpropagating through the learned differentiable model. An advantage of structuring generative models in this way is that it allows us to extract causal relationships between symbols that might form part of the user's specification of the task, as manifested in the demonstrations. We show that the proposed method is capable of correctly distinguishing between three user types, who differ in degrees of cautiousness in their motion, while performing the task of moving objects with a kinesthetically driven robot in a tabletop environment. Our method successfully identifies the correct type, within the specified time, in 99% [97.8 - 99.8] of the cases, which outperforms an IRL baseline. We also show that our proposed method correctly changes a default trajectory to one satisfying a particular user specification even with unseen objects. The resulting trajectory is shown to be directly implementable on a PR2 humanoid robot completing the same task.
From explanation to synthesis: Compositional program induction for learning from demonstration
Feb 27, 2019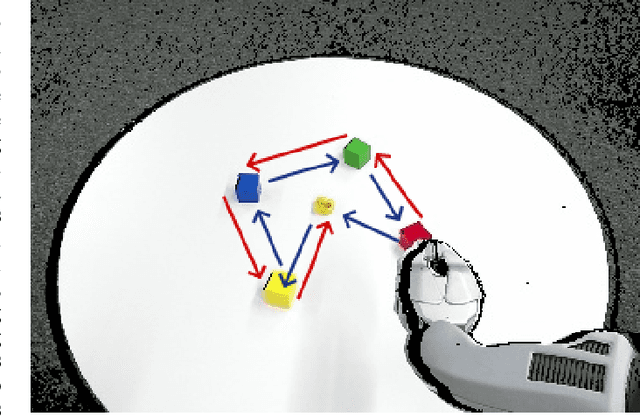

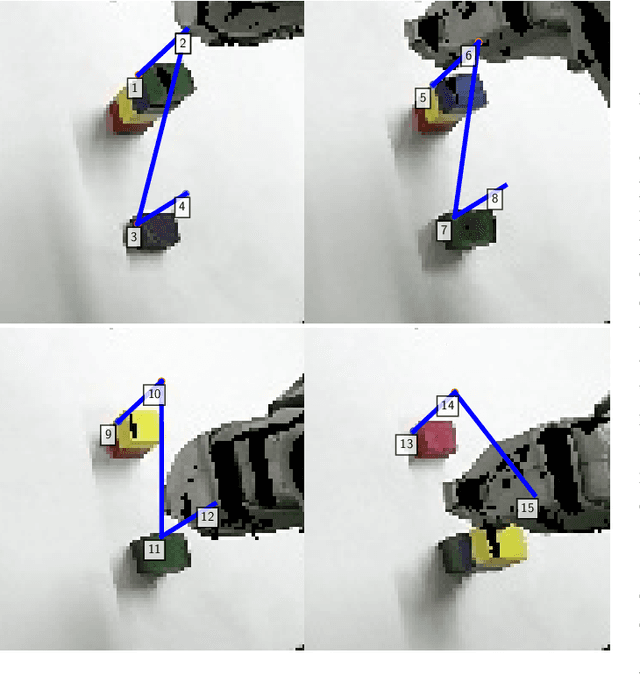
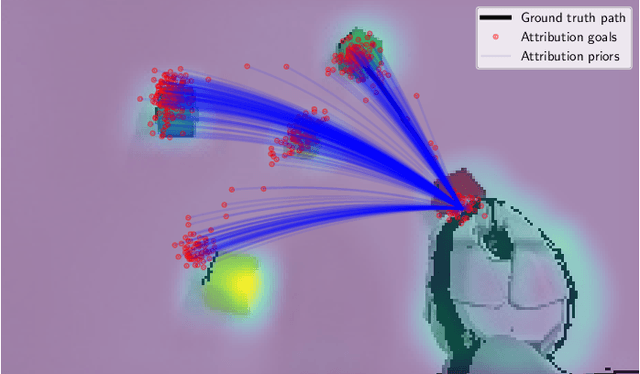
Hybrid systems are a compact and natural mechanism with which to address problems in robotics. This work introduces an approach to learning hybrid systems from demonstrations, with an emphasis on extracting models that are explicitly verifiable and easily interpreted by robot operators. We fit a sequence of controllers using sequential importance sampling under a generative switching proportional controller task model. Here, we parameterise controllers using a proportional gain and a visually verifiable joint angle goal. Inference under this model is challenging, but we address this by introducing an attribution prior extracted from a neural end-to-end visuomotor control model. Given the sequence of controllers comprising a task, we simplify the trace using grammar parsing strategies, taking advantage of the sequence compositionality, before grounding the controllers by training perception networks to predict goals given images. Using this approach, we are successfully able to induce a program for a visuomotor reaching task involving loops and conditionals from a single demonstration and a neural end-to-end model. In addition, we are able to discover the program used for a tower building task. We argue that computer program-like control systems are more interpretable than alternative end-to-end learning approaches, and that hybrid systems inherently allow for better generalisation across task configurations.
Learning Best Response Strategies for Agents in Ad Exchanges
Feb 10, 2019
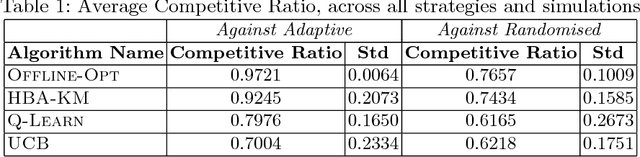
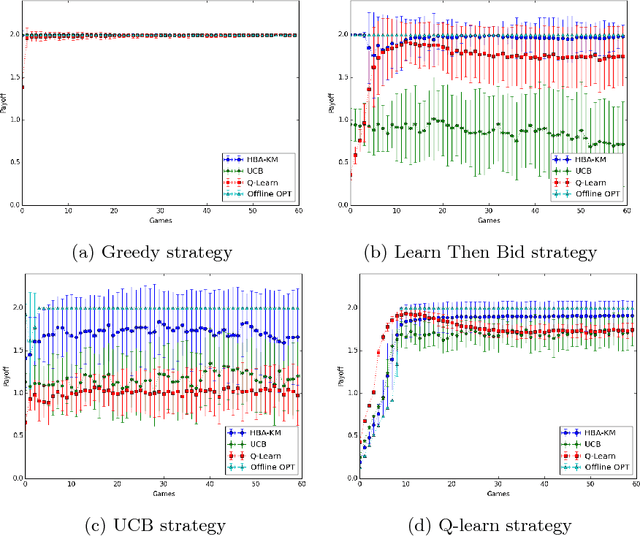
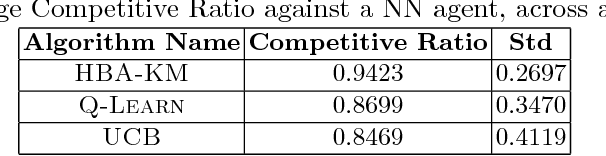
Ad exchanges are widely used in platforms for online display advertising. Autonomous agents operating in these exchanges must learn policies for interacting profitably with a diverse, continually changing, but unknown market. We consider this problem from the perspective of a publisher, strategically interacting with an advertiser through a posted price mechanism. The learning problem for this agent is made difficult by the fact that information is censored, i.e., the publisher knows if an impression is sold but no other quantitative information. We address this problem using the Harsanyi-Bellman Ad Hoc Coordination (HBA) algorithm, which conceptualises this interaction in terms of a Stochastic Bayesian Game and arrives at optimal actions by best responding with respect to probabilistic beliefs maintained over a candidate set of opponent behaviour profiles. We adapt and apply HBA to the censored information setting of ad exchanges. Also, addressing the case of stochastic opponents, we devise a strategy based on a Kaplan-Meier estimator for opponent modelling. We evaluate the proposed method using simulations wherein we show that HBA-KM achieves substantially better competitive ratio and lower variance of return than baselines, including a Q-learning agent and a UCB-based online learning agent, and comparable to the offline optimal algorithm.
Active Localization of Gas Leaks using Fluid Simulation
Jan 28, 2019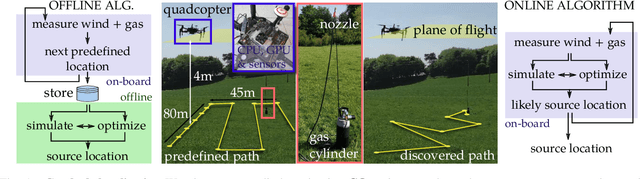
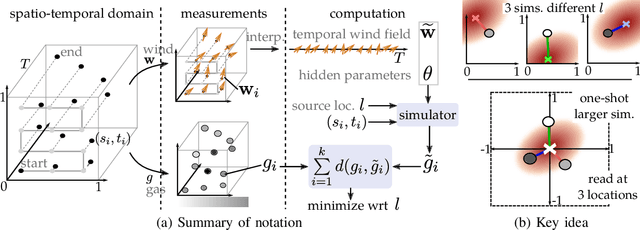
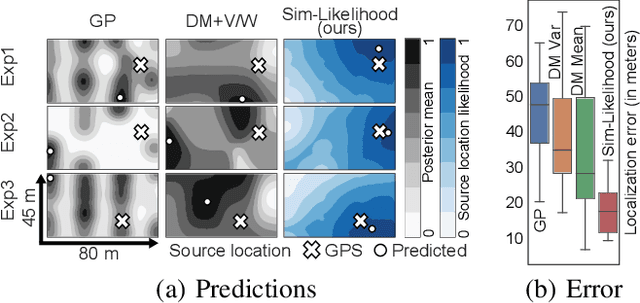
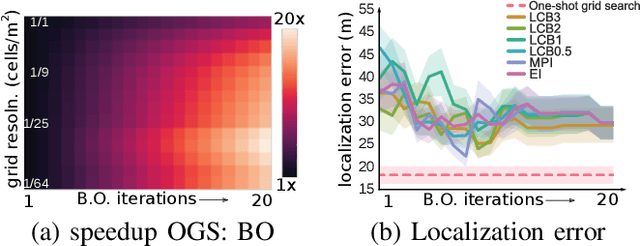
Sensors are routinely mounted on robots to acquire various forms of measurements in spatio-temporal fields. Locating features within these fields and reconstruction (mapping) of the dense fields can be challenging in resource-constrained situations, such as when trying to locate the source of a gas leak from a small number of measurements. In such cases, a model of the underlying complex dynamics can be exploited to discover informative paths within the field. We use a fluid simulator as a model, to guide inference for the location of a gas leak. We perform localization via minimization of the discrepancy between observed measurements and gas concentrations predicted by the simulator. Our method is able to account for dynamically varying parameters of wind flow (e.g., direction and strength), and its effects on the observed distribution of gas. We develop algorithms for off-line inference as well as for on-line path discovery via active sensing. We demonstrate the efficiency, accuracy and versatility of our algorithm using experiments with a physical robot conducted in outdoor environments. We deploy an unmanned air vehicle (UAV) mounted with a CO2 sensor to automatically seek out a gas cylinder emitting CO2 via a nozzle. We evaluate the accuracy of our algorithm by measuring the error in the inferred location of the nozzle, based on which we show that our proposed approach is competitive with respect to state of the art baselines.
Interpretable Latent Spaces for Learning from Demonstration
Oct 02, 2018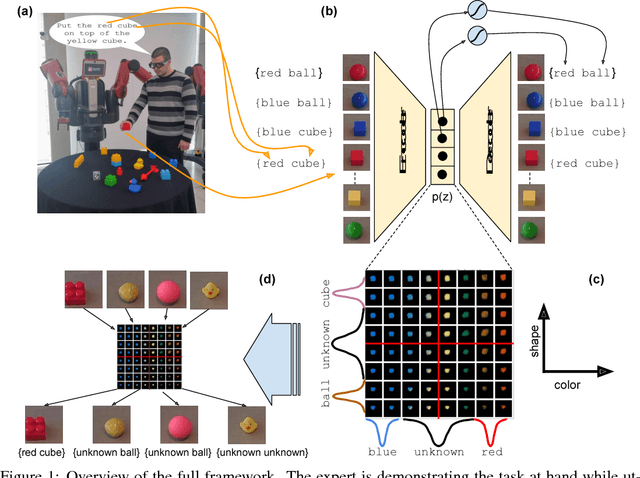
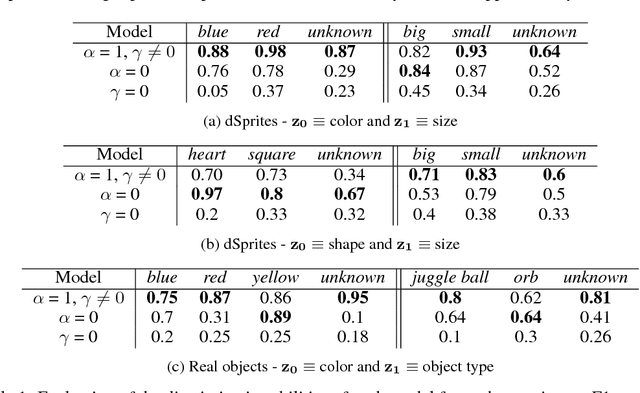
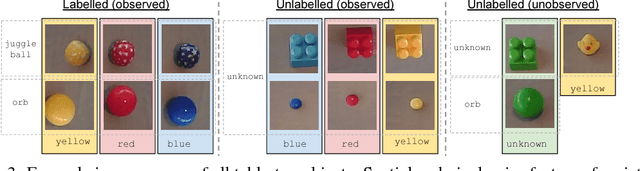
Effective human-robot interaction, such as in robot learning from human demonstration, requires the learning agent to be able to ground abstract concepts (such as those contained within instructions) in a corresponding high-dimensional sensory input stream from the world. Models such as deep neural networks, with high capacity through their large parameter spaces, can be used to compress the high-dimensional sensory data to lower dimensional representations. These low-dimensional representations facilitate symbol grounding, but may not guarantee that the representation would be human-interpretable. We propose a method which utilises the grouping of user-defined symbols and their corresponding sensory observations in order to align the learnt compressed latent representation with the semantic notions contained in the abstract labels. We demonstrate this through experiments with both simulated and real-world object data, showing that such alignment can be achieved in a process of physical symbol grounding.
Efficient Computation of Collision Probabilities for Safe Motion Planning
Apr 15, 2018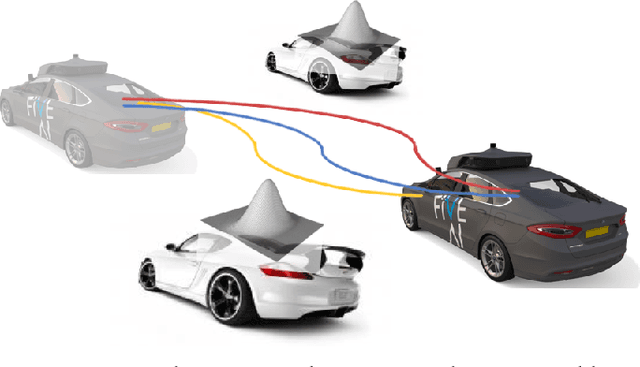
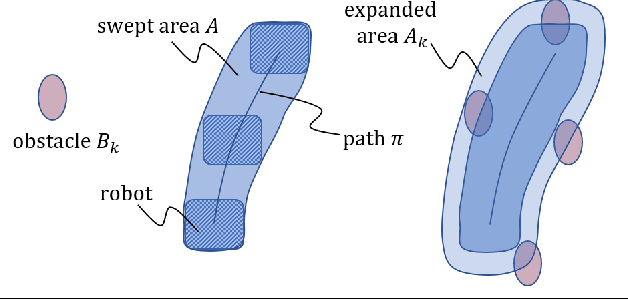
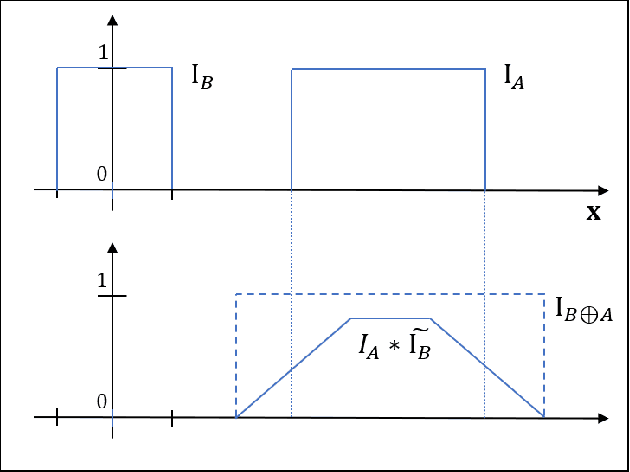
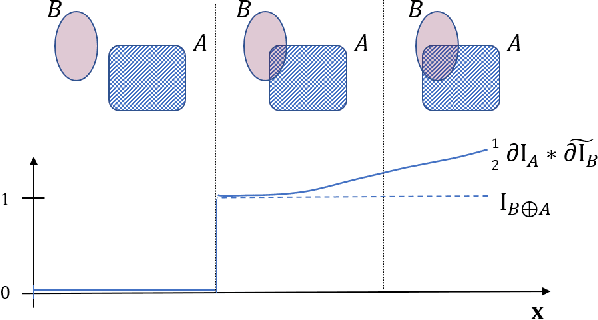
We address the problem of safe motion planning. As mobile robots and autonomous vehicles become increasingly more prevalent in human-centered environments, the need to ensure safety in the sense of guaranteed collision free behaviour has taken renewed urgency. Achieving this when perceptual modules provide only noisy estimates of objects in the environment requires new approaches. Working within a probabilistic framework for describing the environment, we present methods for efficiently calculating a probabilistic risk of collision for a candidate path. This may be used to stratify a set of candidate trajectories by levels of a safety threshold. Given such a stratification, based on user-defined thresholds, motion synthesis techniques could optimise for secondary criteria with the assurance that a primary safety criterion is already being satisfied. A key contribution of this paper is the use of a `convolution trick' to factor the calculation of integrals providing bounds on collision risk, enabling an $O(1)$ computation even in cluttered and complex environments.