 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning from Mistakes: Loss-Aware Memory Enhanced Continual Learning for LiDAR Place Recognition
Nov 19, 2025



LiDAR place recognition plays a crucial role in SLAM, robot navigation, and autonomous driving. However, existing LiDAR place recognition methods often struggle to adapt to new environments without forgetting previously learned knowledge, a challenge widely known as catastrophic forgetting. To address this issue, we propose KDF+, a novel continual learning framework for LiDAR place recognition that extends the KDF paradigm with a loss-aware sampling strategy and a rehearsal enhancement mechanism. The proposed sampling strategy estimates the learning difficulty of each sample via its loss value and selects samples for replay according to their estimated difficulty. Harder samples, which tend to encode more discriminative information, are sampled with higher probability while maintaining distributional coverage across the dataset. In addition, the rehearsal enhancement mechanism encourages memory samples to be further refined during new-task training by slightly reducing their loss relative to previous tasks, thereby reinforcing long-term knowledge retention. Extensive experiments across multiple benchmarks demonstrate that KDF+ consistently outperforms existing continual learning methods and can be seamlessly integrated into state-of-the-art continual learning for LiDAR place recognition frameworks to yield significant and stable performance gains. The code will be available at https://github.com/repo/KDF-plus.
Ranking-aware Continual Learning for LiDAR Place Recognition
May 12, 2025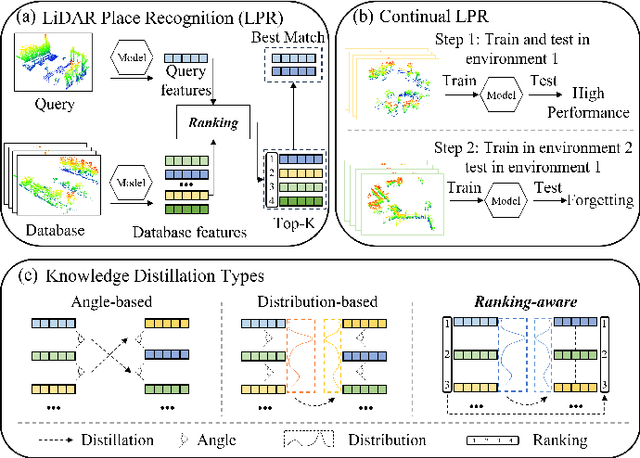
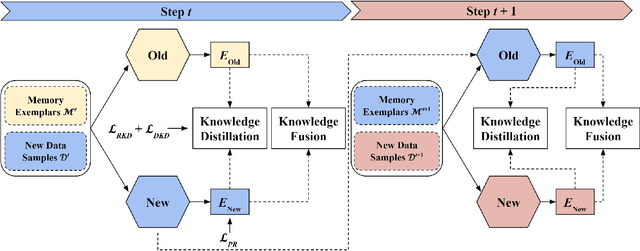
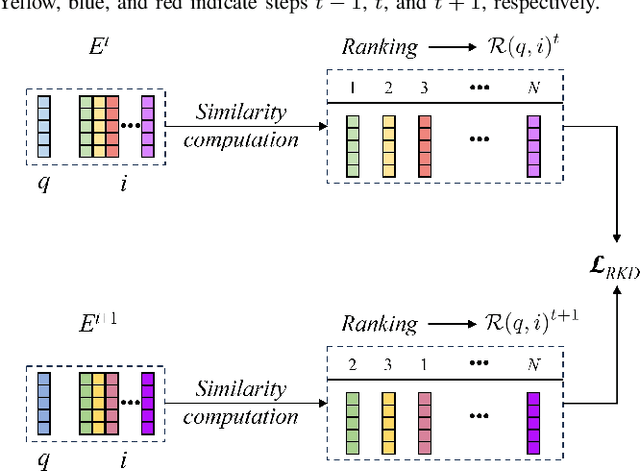
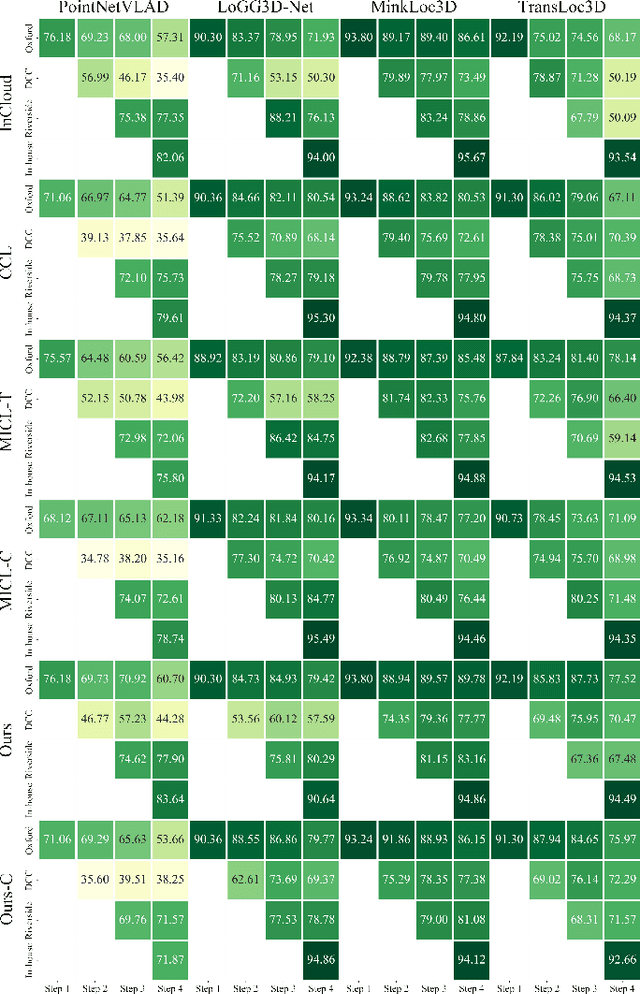
Place recognition plays a significant role in SLAM, robot navigation, and autonomous driving applications. Benefiting from deep learning, the performance of LiDAR place recognition (LPR) has been greatly improved. However, many existing learning-based LPR methods suffer from catastrophic forgetting, which severely harms the performance of LPR on previously trained places after training on a new environment. In this paper, we introduce a continual learning framework for LPR via Knowledge Distillation and Fusion (KDF) to alleviate forgetting. Inspired by the ranking process of place recognition retrieval, we present a ranking-aware knowledge distillation loss that encourages the network to preserve the high-level place recognition knowledge. We also introduce a knowledge fusion module to integrate the knowledge of old and new models for LiDAR place recognition. Our extensive experiments demonstrate that KDF can be applied to different networks to overcome catastrophic forgetting, surpassing the state-of-the-art methods in terms of mean Recall@1 and forgetting score.
MVC-VPR: Mutual Learning of Viewpoint Classification and Visual Place Recognition
Dec 13, 2024



Visual Place Recognition (VPR) aims to robustly identify locations by leveraging image retrieval based on descriptors encoded from environmental images. However, drastic appearance changes of images captured from different viewpoints at the same location pose incoherent supervision signals for descriptor learning, which severely hinder the performance of VPR. Previous work proposes classifying images based on manually defined rules or ground truth labels for viewpoints, followed by descriptor training based on the classification results. However, not all datasets have ground truth labels of viewpoints and manually defined rules may be suboptimal, leading to degraded descriptor performance.To address these challenges, we introduce the mutual learning of viewpoint self-classification and VPR. Starting from coarse classification based on geographical coordinates, we progress to finer classification of viewpoints using simple clustering techniques. The dataset is partitioned in an unsupervised manner while simultaneously training a descriptor extractor for place recognition. Experimental results show that this approach almost perfectly partitions the dataset based on viewpoints, thus achieving mutually reinforcing effects. Our method even excels state-of-the-art (SOTA) methods that partition datasets using ground truth labels.