 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynVLA: Learning World Dynamics for Action Reasoning in Autonomous Driving
Mar 11, 2026We propose DynVLA, a driving VLA model that introduces a new CoT paradigm termed Dynamics CoT. DynVLA forecasts compact world dynamics before action generation, enabling more informed and physically grounded decision-making. To obtain compact dynamics representations, DynVLA introduces a Dynamics Tokenizer that compresses future evolution into a small set of dynamics tokens. Considering the rich environment dynamics in interaction-intensive driving scenarios, DynVLA decouples ego-centric and environment-centric dynamics, yielding more accurate world dynamics modeling. We then train DynVLA to generate dynamics tokens before actions through SFT and RFT, improving decision quality while maintaining latency-efficient inference. Compared to Textual CoT, which lacks fine-grained spatiotemporal understanding, and Visual CoT, which introduces substantial redundancy due to dense image prediction, Dynamics CoT captures the evolution of the world in a compact, interpretable, and efficient form. Extensive experiments on NAVSIM, Bench2Drive, and a large-scale in-house dataset demonstrate that DynVLA consistently outperforms Textual CoT and Visual CoT methods, validating the effectiveness and practical value of Dynamics CoT.
DriveVLA-W0: World Models Amplify Data Scaling Law in Autonomous Driving
Oct 14, 2025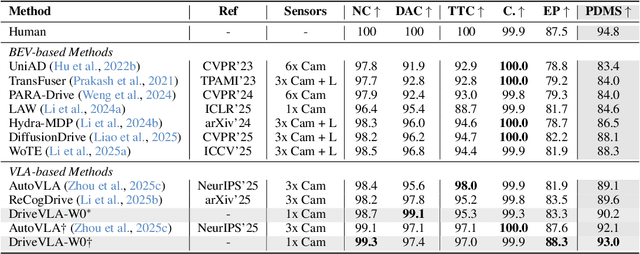
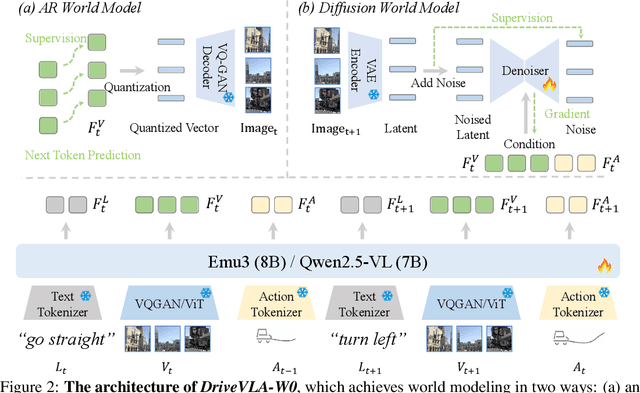

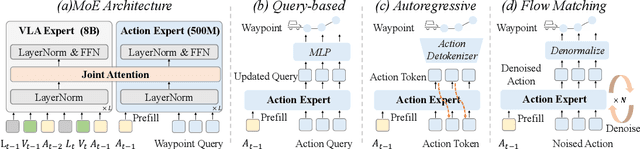
Scaling Vision-Language-Action (VLA) models on large-scale data offers a promising path to achieving a more generalized driving intelligence. However, VLA models are limited by a ``supervision deficit'': the vast model capacity is supervised by sparse, low-dimensional actions, leaving much of their representational power underutilized. To remedy this, we propose \textbf{DriveVLA-W0}, a training paradigm that employs world modeling to predict future images. This task generates a dense, self-supervised signal that compels the model to learn the underlying dynamics of the driving environment. We showcase the paradigm's versatility by instantiating it for two dominant VLA archetypes: an autoregressive world model for VLAs that use discrete visual tokens, and a diffusion world model for those operating on continuous visual features. Building on the rich representations learned from world modeling, we introduce a lightweight action expert to address the inference latency for real-time deployment. Extensive experiments on the NAVSIM v1/v2 benchmark and a 680x larger in-house dataset demonstrate that DriveVLA-W0 significantly outperforms BEV and VLA baselines. Crucially, it amplifies the data scaling law, showing that performance gains accelerate as the training dataset size increases.
ResDiff: Combining CNN and Diffusion Model for Image Super-Resolution
Mar 16, 2023



Adapting the Diffusion Probabilistic Model (DPM) for direct image super-resolution is wasteful, given that a simple Convolutional Neural Network (CNN) can recover the main low-frequency content. Therefore, we present ResDiff, a novel Diffusion Probabilistic Model based on Residual structure for Single Image Super-Resolution (SISR). ResDiff utilizes a combination of a CNN, which restores primary low-frequency components, and a DPM, which predicts the residual between the ground-truth image and the CNN-predicted image. In contrast to the common diffusion-based methods that directly use LR images to guide the noise towards HR space, ResDiff utilizes the CNN's initial prediction to direct the noise towards the residual space between HR space and CNN-predicted space, which not only accelerates the generation process but also acquires superior sample quality. Additionally, a frequency-domain-based loss function for CNN is introduced to facilitate its restoration, and a frequency-domain guided diffusion is designed for DPM on behalf of predicting high-frequency details. The extensive experiments on multiple benchmark datasets demonstrate that ResDiff outperforms previous diffusion-based methods in terms of shorter model convergence time, superior generation quality, and more diverse samples.