 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMovable Antenna-Enhanced Near-Field Flexible Beamforming: Performance Analysis and Optimization
Jan 25, 2026As an emerging wireless communication technology, movable antennas (MAs) offer the ability to adjust the spatial correlation of steering vectors, enabling more flexible beamforming compared to fixed-position antennas (FPAs). In this paper, we investigate the use of MAs for two typical near-field beamforming scenarios: beam nulling and multi-beam forming. In the first scenario, we aim to jointly optimize the positions of multiple MAs and the beamforming vector to maximize the beam gain toward a desired direction while nulling interference toward multiple undesired directions. In the second scenario, the objective is to maximize the minimum beam gain among all the above directions. However, both problems are non-convex and challenging to solve optimally. To gain insights, we first analyze several special cases and show that, with proper positioning of the MAs, directing the beam toward a specific direction can lead to nulls or full gains in other directions in the two scenarios, respectively. For the general cases, we propose a discrete sampling method and an alternating optimization algorithm to obtain high-quality suboptimal solutions to the two formulated problems. Furthermore, considering the practical limitations in antenna positioning accuracy, we analyze the impact of position errors on the performance of the optimized beamforming and MA positions, by introducing a Taylor series approximation for the near-field beam gain at each target. Numerical results validate our theoretical findings and demonstrate the effectiveness of our proposed algorithms.
AHPPEBot: Autonomous Robot for Tomato Harvesting based on Phenotyping and Pose Estimation
May 11, 2024



To address the limitations inherent to conventional automated harvesting robots specifically their suboptimal success rates and risk of crop damage, we design a novel bot named AHPPEBot which is capable of autonomous harvesting based on crop phenotyping and pose estimation. Specifically, In phenotyping, the detection, association, and maturity estimation of tomato trusses and individual fruits are accomplished through a multi-task YOLOv5 model coupled with a detection-based adaptive DBScan clustering algorithm. In pose estimation, we employ a deep learning model to predict seven semantic keypoints on the pedicel. These keypoints assist in the robot's path planning, minimize target contact, and facilitate the use of our specialized end effector for harvesting. In autonomous tomato harvesting experiments conducted in commercial greenhouses, our proposed robot achieved a harvesting success rate of 86.67%, with an average successful harvest time of 32.46 s, showcasing its continuous and robust harvesting capabilities. The result underscores the potential of harvesting robots to bridge the labor gap in agriculture.
Feature Analysis and Selection for Training an End-to-End Autonomous Vehicle Controller Using the Deep Learning Approach
Mar 28, 2017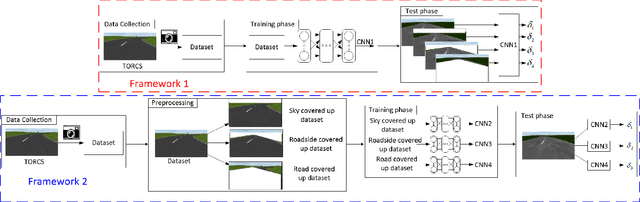
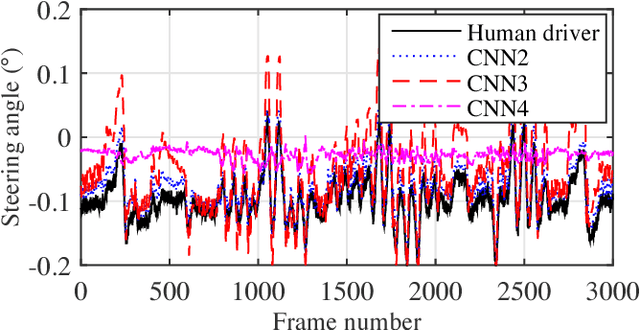
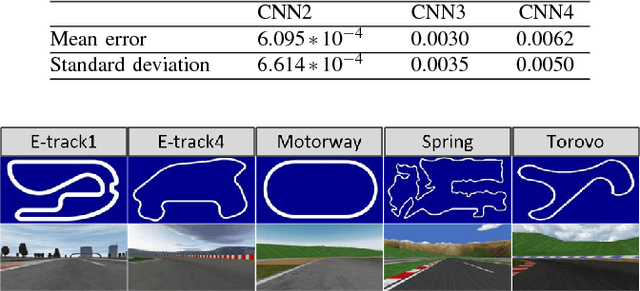
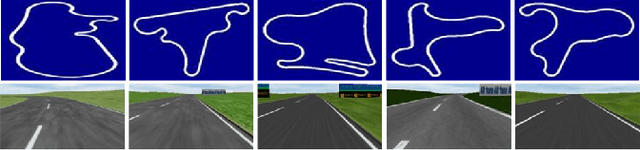
Deep learning-based approaches have been widely used for training controllers for autonomous vehicles due to their powerful ability to approximate nonlinear functions or policies. However, the training process usually requires large labeled data sets and takes a lot of time. In this paper, we analyze the influences of features on the performance of controllers trained using the convolutional neural networks (CNNs), which gives a guideline of feature selection to reduce computation cost. We collect a large set of data using The Open Racing Car Simulator (TORCS) and classify the image features into three categories (sky-related, roadside-related, and road-related features).We then design two experimental frameworks to investigate the importance of each single feature for training a CNN controller.The first framework uses the training data with all three features included to train a controller, which is then tested with data that has one feature removed to evaluate the feature's effects. The second framework is trained with the data that has one feature excluded, while all three features are included in the test data. Different driving scenarios are selected to test and analyze the trained controllers using the two experimental frameworks. The experiment results show that (1) the road-related features are indispensable for training the controller, (2) the roadside-related features are useful to improve the generalizability of the controller to scenarios with complicated roadside information, and (3) the sky-related features have limited contribution to train an end-to-end autonomous vehicle controller.