 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNew Mechanisms in Flex Distribution for Bounded Suboptimal Multi-Agent Path Finding
Jul 22, 2025



Multi-Agent Path Finding (MAPF) is the problem of finding a set of collision-free paths, one for each agent in a shared environment. Its objective is to minimize the sum of path costs (SOC), where the path cost of each agent is defined as the travel time from its start location to its target location. Explicit Estimation Conflict-Based Search (EECBS) is the leading algorithm for bounded-suboptimal MAPF, with the SOC of the solution being at most a user-specified factor $w$ away from optimal. EECBS maintains sets of paths and a lower bound $LB$ on the optimal SOC. Then, it iteratively selects a set of paths whose SOC is at most $w \cdot LB$ and introduces constraints to resolve collisions. For each path in a set, EECBS maintains a lower bound on its optimal path that satisfies constraints. By finding an individually bounded-suboptimal path with cost at most a threshold of $w$ times its lower bound, EECBS guarantees to find a bounded-suboptimal solution. To speed up EECBS, previous work uses flex distribution to increase the threshold. Though EECBS with flex distribution guarantees to find a bounded-suboptimal solution, increasing the thresholds may push the SOC beyond $w \cdot LB$, forcing EECBS to switch among different sets of paths instead of resolving collisions on a particular set of paths, and thus reducing efficiency. To address this issue, we propose Conflict-Based Flex Distribution that distributes flex in proportion to the number of collisions. We also estimate the delays needed to satisfy constraints and propose Delay-Based Flex Distribution. On top of that, we propose Mixed-Strategy Flex Distribution, combining both in a hierarchical framework. We prove that EECBS with our new flex distribution mechanisms is complete and bounded-suboptimal. Our experiments show that our approaches outperform the original (greedy) flex distribution.
Anytime Multi-Agent Path Finding with an Adaptive Delay-Based Heuristic
Aug 06, 2024Anytime multi-agent path finding (MAPF) is a promising approach to scalable path optimization in multi-agent systems. MAPF-LNS, based on Large Neighborhood Search (LNS), is the current state-of-the-art approach where a fast initial solution is iteratively optimized by destroying and repairing selected paths of the solution. Current MAPF-LNS variants commonly use an adaptive selection mechanism to choose among multiple destroy heuristics. However, to determine promising destroy heuristics, MAPF-LNS requires a considerable amount of exploration time. As common destroy heuristics are non-adaptive, any performance bottleneck caused by these heuristics cannot be overcome via adaptive heuristic selection alone, thus limiting the overall effectiveness of MAPF-LNS in terms of solution cost. In this paper, we propose Adaptive Delay-based Destroy-and-Repair Enhanced with Success-based Self-Learning (ADDRESS) as a single-destroy-heuristic variant of MAPF-LNS. ADDRESS applies restricted Thompson Sampling to the top-K set of the most delayed agents to select a seed agent for adaptive LNS neighborhood generation. We evaluate ADDRESS in multiple maps from the MAPF benchmark set and demonstrate cost improvements by at least 50% in large-scale scenarios with up to a thousand agents, compared with the original MAPF-LNS and other state-of-the-art methods.
Multi-Robot Geometric Task-and-Motion Planning for Collaborative Manipulation Tasks
Oct 13, 2023We address multi-robot geometric task-and-motion planning (MR-GTAMP) problems in synchronous, monotone setups. The goal of the MR-GTAMP problem is to move objects with multiple robots to goal regions in the presence of other movable objects. We focus on collaborative manipulation tasks where the robots have to adopt intelligent collaboration strategies to be successful and effective, i.e., decide which robot should move which objects to which positions, and perform collaborative actions, such as handovers. To endow robots with these collaboration capabilities, we propose to first collect occlusion and reachability information for each robot by calling motion-planning algorithms. We then propose a method that uses the collected information to build a graph structure which captures the precedence of the manipulations of different objects and supports the implementation of a mixed-integer program to guide the search for highly effective collaborative task-and-motion plans. The search process for collaborative task-and-motion plans is based on a Monte-Carlo Tree Search (MCTS) exploration strategy to achieve exploration-exploitation balance. We evaluate our framework in two challenging MR-GTAMP domains and show that it outperforms two state-of-the-art baselines with respect to the planning time, the resulting plan length and the number of objects moved. We also show that our framework can be applied to underground mining operations where a robotic arm needs to coordinate with an autonomous roof bolter. We demonstrate plan execution in two roof-bolting scenarios both in simulation and on robots.
Flatland Competition 2020: MAPF and MARL for Efficient Train Coordination on a Grid World
Mar 30, 2021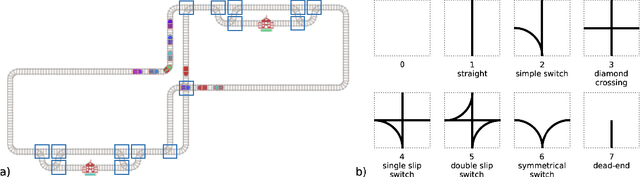
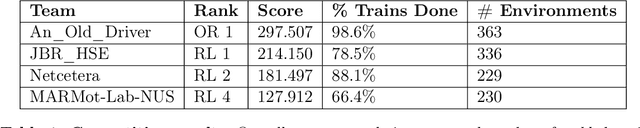
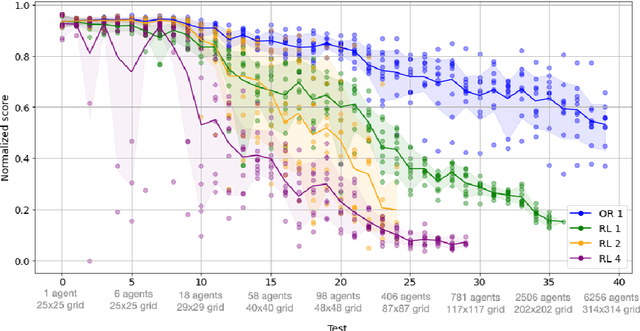
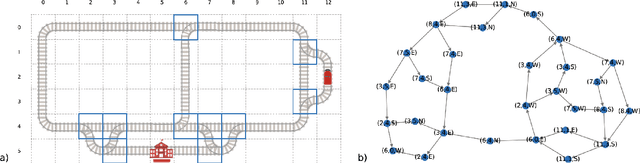
The Flatland competition aimed at finding novel approaches to solve the vehicle re-scheduling problem (VRSP). The VRSP is concerned with scheduling trips in traffic networks and the re-scheduling of vehicles when disruptions occur, for example the breakdown of a vehicle. While solving the VRSP in various settings has been an active area in operations research (OR) for decades, the ever-growing complexity of modern railway networks makes dynamic real-time scheduling of traffic virtually impossible. Recently, multi-agent reinforcement learning (MARL) has successfully tackled challenging tasks where many agents need to be coordinated, such as multiplayer video games. However, the coordination of hundreds of agents in a real-life setting like a railway network remains challenging and the Flatland environment used for the competition models these real-world properties in a simplified manner. Submissions had to bring as many trains (agents) to their target stations in as little time as possible. While the best submissions were in the OR category, participants found many promising MARL approaches. Using both centralized and decentralized learning based approaches, top submissions used graph representations of the environment to construct tree-based observations. Further, different coordination mechanisms were implemented, such as communication and prioritization between agents. This paper presents the competition setup, four outstanding solutions to the competition, and a cross-comparison between them.