 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Dexterous Grasping from Sparse Taxonomy Guidance
Apr 05, 2026Dexterous manipulation requires planning a grasp configuration suited to the object and task, which is then executed through coordinated multi-finger control. However, specifying grasp plans with dense pose or contact targets for every object and task is impractical. Meanwhile, end-to-end reinforcement learning from task rewards alone lacks controllability, making it difficult for users to intervene when failures occur. To this end, we present GRIT, a two-stage framework that learns dexterous control from sparse taxonomy guidance. GRIT first predicts a taxonomy-based grasp specification from the scene and task context. Conditioned on this sparse command, a policy generates continuous finger motions that accomplish the task while preserving the intended grasp structure. Our result shows that certain grasp taxonomies are more effective for specific object geometries. By leveraging this relationship, GRIT improves generalization to novel objects over baselines and achieves an overall success rate of 87.9%. Moreover, real-world experiments demonstrate controllability, enabling grasp strategies to be adjusted through high-level taxonomy selection based on object geometry and task intent.
RoVo: Robust Voice Protection Against Unauthorized Speech Synthesis with Embedding-Level Perturbations
May 19, 2025With the advancement of AI-based speech synthesis technologies such as Deep Voice, there is an increasing risk of voice spoofing attacks, including voice phishing and fake news, through unauthorized use of others' voices. Existing defenses that inject adversarial perturbations directly into audio signals have limited effectiveness, as these perturbations can easily be neutralized by speech enhancement methods. To overcome this limitation, we propose RoVo (Robust Voice), a novel proactive defense technique that injects adversarial perturbations into high-dimensional embedding vectors of audio signals, reconstructing them into protected speech. This approach effectively defends against speech synthesis attacks and also provides strong resistance to speech enhancement models, which represent a secondary attack threat. In extensive experiments, RoVo increased the Defense Success Rate (DSR) by over 70% compared to unprotected speech, across four state-of-the-art speech synthesis models. Specifically, RoVo achieved a DSR of 99.5% on a commercial speaker-verification API, effectively neutralizing speech synthesis attack. Moreover, RoVo's perturbations remained robust even under strong speech enhancement conditions, outperforming traditional methods. A user study confirmed that RoVo preserves both naturalness and usability of protected speech, highlighting its effectiveness in complex and evolving threat scenarios.
Spatio-Temporal Motion Retargeting for Quadruped Robots
Apr 17, 2024This work introduces a motion retargeting approach for legged robots, which aims to create motion controllers that imitate the fine behavior of animals. Our approach, namely spatio-temporal motion retargeting (STMR), guides imitation learning procedures by transferring motion from source to target, effectively bridging the morphological disparities by ensuring the feasibility of imitation on the target system. Our STMR method comprises two components: spatial motion retargeting (SMR) and temporal motion retargeting (TMR). On the one hand, SMR tackles motion retargeting at the kinematic level by generating kinematically feasible whole-body motions from keypoint trajectories. On the other hand, TMR aims to retarget motion at the dynamic level by optimizing motion in the temporal domain. We showcase the effectiveness of our method in facilitating Imitation Learning (IL) for complex animal movements through a series of simulation and hardware experiments. In these experiments, our STMR method successfully tailored complex animal motions from various media, including video captured by a hand-held camera, to fit the morphology and physical properties of the target robots. This enabled RL policy training for precise motion tracking, while baseline methods struggled with highly dynamic motion involving flying phases. Moreover, we validated that the control policy can successfully imitate six different motions in two quadruped robots with different dimensions and physical properties in real-world settings.
Developing a Meta-suggestion Engine for Search Query
Oct 25, 2021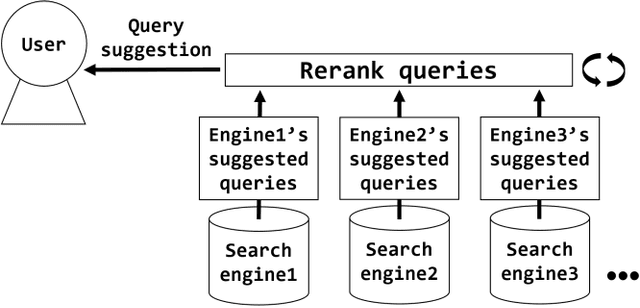
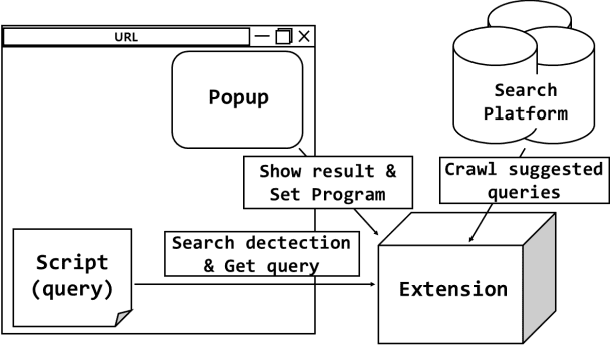
With the development of the Internet and the accumulation of information on the web, users use a search engine to easily obtain the desired information. A query suggestion is one of the main services provided by a search engine, and is very important for improving search performance, creating efficient queries, and reducing search time. However, there are search engines that do not support the query suggestion service. Under such engines, if users want to perform a search, they would have much difficulties in effectively performing the search. In this paper, to tackle the problem, we propose and develop a metasuggestion engine that crawls suggested search queries from search engines with a suggestion service, applies a re-ranking algorithm, and provides the suggested search queries in the form of an extension program on a web browser. Meta-suggestion engine are useful for users searching in engines that do not provide query suggestions, as they provide query suggestions wherever the user searches. We evaluate engines with relevance-based and predictive hit-based evaluation methods, showing that MSE produces good quality suggestions. We study improvements in target engine selection and re-ranking algorithms in future studies.