 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimCol3D -- 3D Reconstruction during Colonoscopy Challenge
Jul 20, 2023Colorectal cancer is one of the most common cancers in the world. While colonoscopy is an effective screening technique, navigating an endoscope through the colon to detect polyps is challenging. A 3D map of the observed surfaces could enhance the identification of unscreened colon tissue and serve as a training platform. However, reconstructing the colon from video footage remains unsolved due to numerous factors such as self-occlusion, reflective surfaces, lack of texture, and tissue deformation that limit feature-based methods. Learning-based approaches hold promise as robust alternatives, but necessitate extensive datasets. By establishing a benchmark, the 2022 EndoVis sub-challenge SimCol3D aimed to facilitate data-driven depth and pose prediction during colonoscopy. The challenge was hosted as part of MICCAI 2022 in Singapore. Six teams from around the world and representatives from academia and industry participated in the three sub-challenges: synthetic depth prediction, synthetic pose prediction, and real pose prediction. This paper describes the challenge, the submitted methods, and their results. We show that depth prediction in virtual colonoscopy is robustly solvable, while pose estimation remains an open research question.
PEg TRAnsfer Workflow recognition challenge report: Does multi-modal data improve recognition?
Feb 11, 2022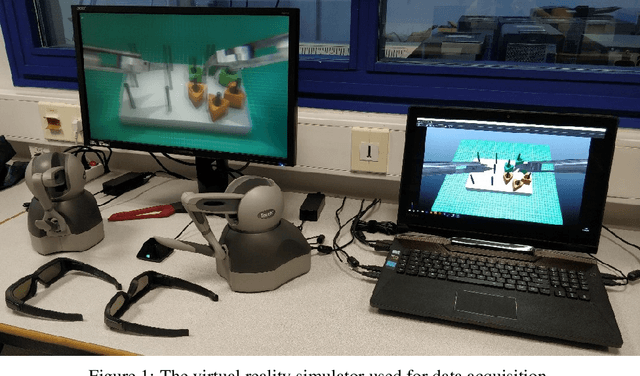
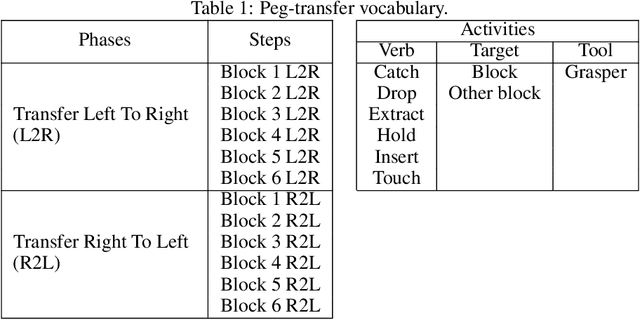
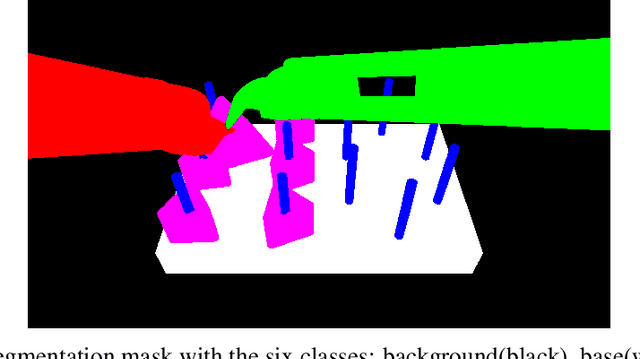
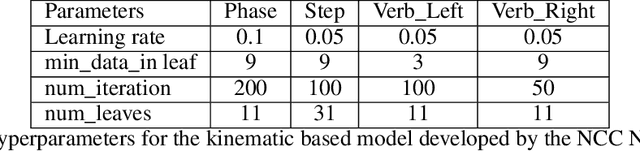
This paper presents the design and results of the "PEg TRAnsfert Workflow recognition" (PETRAW) challenge whose objective was to develop surgical workflow recognition methods based on one or several modalities, among video, kinematic, and segmentation data, in order to study their added value. The PETRAW challenge provided a data set of 150 peg transfer sequences performed on a virtual simulator. This data set was composed of videos, kinematics, semantic segmentation, and workflow annotations which described the sequences at three different granularity levels: phase, step, and activity. Five tasks were proposed to the participants: three of them were related to the recognition of all granularities with one of the available modalities, while the others addressed the recognition with a combination of modalities. Average application-dependent balanced accuracy (AD-Accuracy) was used as evaluation metric to take unbalanced classes into account and because it is more clinically relevant than a frame-by-frame score. Seven teams participated in at least one task and four of them in all tasks. Best results are obtained with the use of the video and the kinematics data with an AD-Accuracy between 93% and 90% for the four teams who participated in all tasks. The improvement between video/kinematic-based methods and the uni-modality ones was significant for all of the teams. However, the difference in testing execution time between the video/kinematic-based and the kinematic-based methods has to be taken into consideration. Is it relevant to spend 20 to 200 times more computing time for less than 3% of improvement? The PETRAW data set is publicly available at www.synapse.org/PETRAW to encourage further research in surgical workflow recognition.