 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms
Aug 26, 2024



Connected and automated vehicles and robot swarms hold transformative potential for enhancing safety, efficiency, and sustainability in the transportation and manufacturing sectors. Extensive testing and validation of these technologies is crucial for their deployment in the real world. While simulations are essential for initial testing, they often have limitations in capturing the complex dynamics of real-world interactions. This limitation underscores the importance of small-scale testbeds. These testbeds provide a realistic, cost-effective, and controlled environment for testing and validating algorithms, acting as an essential intermediary between simulation and full-scale experiments. This work serves to facilitate researchers' efforts in identifying existing small-scale testbeds suitable for their experiments and provide insights for those who want to build their own. In addition, it delivers a comprehensive survey of the current landscape of these testbeds. We derive 62 characteristics of testbeds based on the well-known sense-plan-act paradigm and offer an online table comparing 22 small-scale testbeds based on these characteristics. The online table is hosted on our designated public webpage www.cpm-remote.de/testbeds, and we invite testbed creators and developers to contribute to it. We closely examine nine testbeds in this paper, demonstrating how the derived characteristics can be used to present testbeds. Furthermore, we discuss three ongoing challenges concerning small-scale testbeds that we identified, i.e., small-scale to full-scale transition, sustainability, and power and resource management.
Range Limited Coverage Control using Air-Ground Multi-Robot Teams
Jun 12, 2023In this paper, we investigate how heterogeneous multi-robot systems with different sensing capabilities can observe a domain with an apriori unknown density function. Common coverage control techniques are targeted towards homogeneous teams of robots and do not consider what happens when the sensing capabilities of the robots are vastly different. This work proposes an extension to Lloyd's algorithm that fuses coverage information from heterogeneous robots with differing sensing capabilities to effectively observe a domain. Namely, we study a bimodal team of robots consisting of aerial and ground agents. In our problem formulation we use aerial robots with coarse domain sensors to approximate the number of ground robots needed within their sensing region to effectively cover it. This information is relayed to ground robots, who perform an extension to the Lloyd's algorithm that balances a locally focused coverage controller with a globally focused distribution controller. The stability of the Lloyd's algorithm extension is proven and its performance is evaluated through simulation and experiments using the Robotarium, a remotely-accessible, multi-robot testbed.
Data-Driven Robust Barrier Functions for Safe, Long-Term Operation
Apr 15, 2021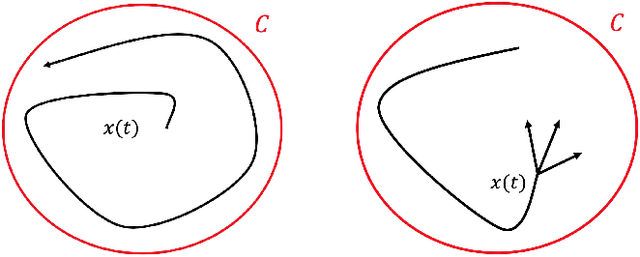
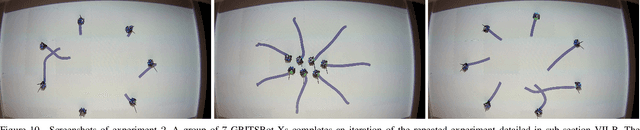
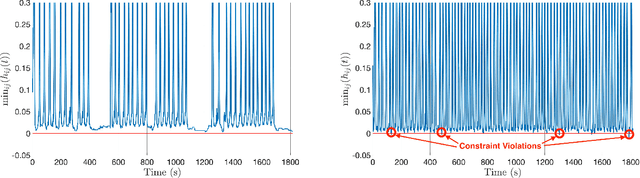
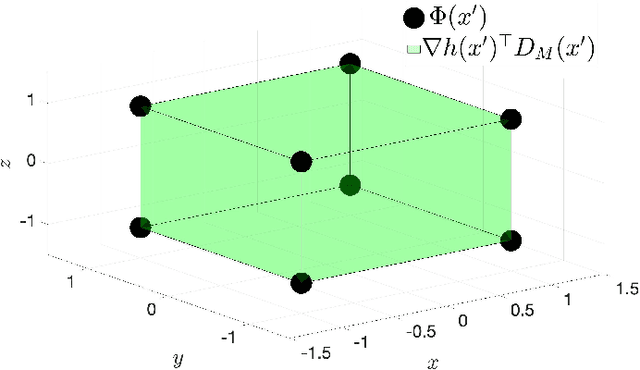
Applications that require multi-robot systems to operate independently for extended periods of time in unknown or unstructured environments face a broad set of challenges, such as hardware degradation, changing weather patterns, or unfamiliar terrain. To operate effectively under these changing conditions, algorithms developed for long-term autonomy applications require a stronger focus on robustness. Consequently, this work considers the ability to satisfy the operation-critical constraints of a disturbed system in a modular fashion, which means compatibility with different system objectives and disturbance representations. Toward this end, this paper introduces a controller-synthesis approach to constraint satisfaction for disturbed control-affine dynamical systems by utilizing Control Barrier Functions (CBFs). The aforementioned framework is constructed by modelling the disturbance as a union of convex hulls and leveraging previous work on CBFs for differential inclusions. This method of disturbance modeling grants compatibility with different disturbance-estimation methods. For example, this work demonstrates how a disturbance learned via a Gaussian process may be utilized in the proposed framework. These estimated disturbances are incorporated into the proposed controller-synthesis framework which is then tested on a fleet of robots in different scenarios.