 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI Recommendation Systems for Lane-Changing Using Adherence-Aware Reinforcement Learning
Apr 28, 2025



In this paper, we present an adherence-aware reinforcement learning (RL) approach aimed at seeking optimal lane-changing recommendations within a semi-autonomous driving environment to enhance a single vehicle's travel efficiency. The problem is framed within a Markov decision process setting and is addressed through an adherence-aware deep Q network, which takes into account the partial compliance of human drivers with the recommended actions. This approach is evaluated within CARLA's driving environment under realistic scenarios.
Off-Policy Evaluation for Sequential Persuasion Process with Unobserved Confounding
Apr 01, 2025



In this paper, we expand the Bayesian persuasion framework to account for unobserved confounding variables in sender-receiver interactions. While traditional models assume that belief updates follow Bayesian principles, real-world scenarios often involve hidden variables that impact the receiver's belief formation and decision-making. We conceptualize this as a sequential decision-making problem, where the sender and receiver interact over multiple rounds. In each round, the sender communicates with the receiver, who also interacts with the environment. Crucially, the receiver's belief update is affected by an unobserved confounding variable. By reformulating this scenario as a Partially Observable Markov Decision Process (POMDP), we capture the sender's incomplete information regarding both the dynamics of the receiver's beliefs and the unobserved confounder. We prove that finding an optimal observation-based policy in this POMDP is equivalent to solving for an optimal signaling strategy in the original persuasion framework. Furthermore, we demonstrate how this reformulation facilitates the application of proximal learning for off-policy evaluation in the persuasion process. This advancement enables the sender to evaluate alternative signaling strategies using only observational data from a behavioral policy, thus eliminating the necessity for costly new experiments.
A Survey on Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms
Aug 26, 2024



Connected and automated vehicles and robot swarms hold transformative potential for enhancing safety, efficiency, and sustainability in the transportation and manufacturing sectors. Extensive testing and validation of these technologies is crucial for their deployment in the real world. While simulations are essential for initial testing, they often have limitations in capturing the complex dynamics of real-world interactions. This limitation underscores the importance of small-scale testbeds. These testbeds provide a realistic, cost-effective, and controlled environment for testing and validating algorithms, acting as an essential intermediary between simulation and full-scale experiments. This work serves to facilitate researchers' efforts in identifying existing small-scale testbeds suitable for their experiments and provide insights for those who want to build their own. In addition, it delivers a comprehensive survey of the current landscape of these testbeds. We derive 62 characteristics of testbeds based on the well-known sense-plan-act paradigm and offer an online table comparing 22 small-scale testbeds based on these characteristics. The online table is hosted on our designated public webpage www.cpm-remote.de/testbeds, and we invite testbed creators and developers to contribute to it. We closely examine nine testbeds in this paper, demonstrating how the derived characteristics can be used to present testbeds. Furthermore, we discuss three ongoing challenges concerning small-scale testbeds that we identified, i.e., small-scale to full-scale transition, sustainability, and power and resource management.
Safe Merging in Mixed Traffic with Confidence
Mar 09, 2024In this letter, we present an approach for learning human driving behavior, without relying on specific model structures or prior distributions, in a mixed-traffic environment where connected and automated vehicles (CAVs) coexist with human-driven vehicles (HDVs). We employ conformal prediction to obtain theoretical safety guarantees and use real-world traffic data to validate our approach. Then, we design a controller that ensures effective merging of CAVs with HDVs with safety guarantees. We provide numerical simulations to illustrate the efficacy of the control approach.
A Framework for Effective AI Recommendations in Cyber-Physical-Human Systems
Mar 08, 2024Many cyber-physical-human systems (CPHS) involve a human decision-maker who may receive recommendations from an artificial intelligence (AI) platform while holding the ultimate responsibility of making decisions. In such CPHS applications, the human decision-maker may depart from an optimal recommended decision and instead implement a different one for various reasons. In this letter, we develop a rigorous framework to overcome this challenge. In our framework, we consider that humans may deviate from AI recommendations as they perceive and interpret the system's state in a different way than the AI platform. We establish the structural properties of optimal recommendation strategies and develop an approximate human model (AHM) used by the AI. We provide theoretical bounds on the optimality gap that arises from an AHM and illustrate the efficacy of our results in a numerical example.
A Hierarchical Approach to Optimal Flow-Based Routing and Coordination of Connected and Automated Vehicles
Mar 31, 2023This paper addresses the challenge of generating optimal vehicle flow at the macroscopic level. Although several studies have focused on optimizing vehicle flow, little attention has been given to ensuring it can be practically achieved. To overcome this issue, we propose a route-recovery and eco-driving strategy for connected and automated vehicles (CAVs) that guarantees optimal flow generation. Our approach involves identifying the optimal vehicle flow that minimizes total travel time, given the constant travel demands in urban areas. We then develop a heuristic route-recovery algorithm to assign routes to CAVs that satisfy all travel demands while maintaining the optimal flow. Our method lets CAVs arrive at each road segment at their desired arrival time based on their assigned route and desired flow. In addition, we present an efficient coordination framework to minimize the energy consumption of CAVs and prevent collisions while crossing intersections. The proposed method can effectively generate optimal vehicle flow and potentially reduce travel time and energy consumption in urban areas.
A Digital Smart City for Emerging Mobility Systems
Sep 14, 2021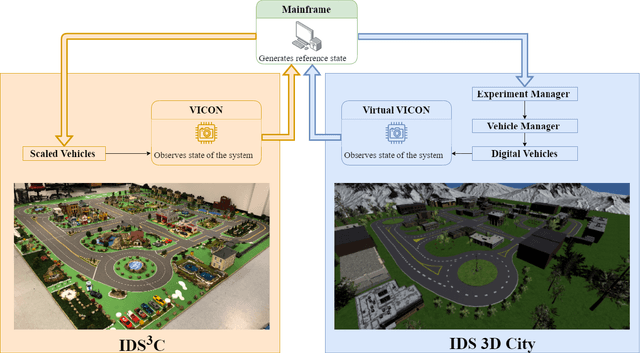
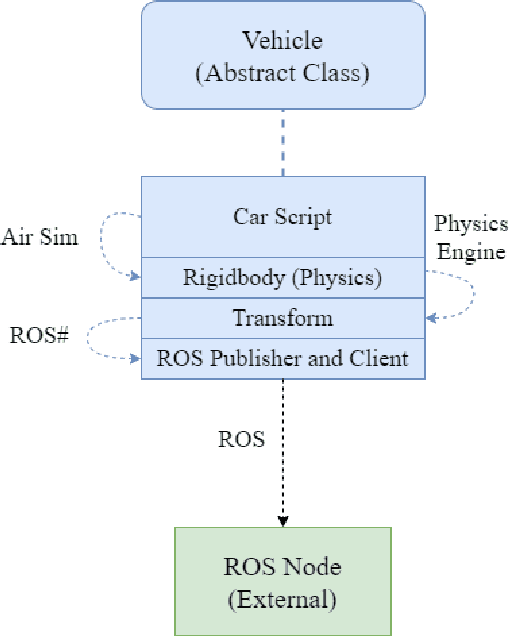
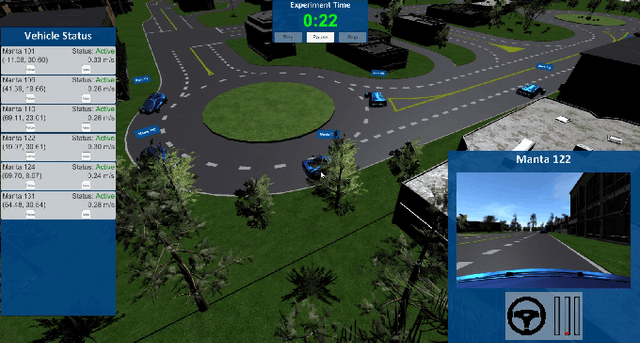
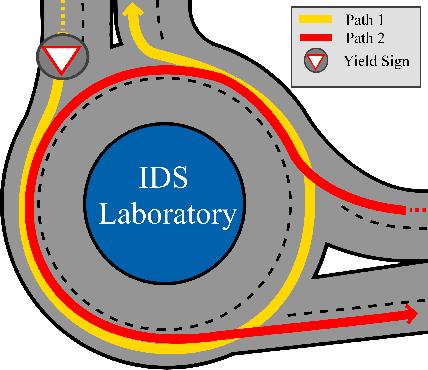
The increasing demand for emerging mobility systems with connected and automated vehicles has imposed the necessity for quality testing environments to support their development. In this paper, we introduce a Unity-based virtual simulation environment for emerging mobility systems, called the Information and Decision Science Lab's Scaled Smart Digital City (IDS $3$D City), intended to operate alongside its physical peer and its established control framework. By utilizing the Robot Operation System, AirSim, and Unity, we constructed a simulation environment capable of iteratively designing experiments significantly faster than it is possible in a physical testbed. This environment provides an intermediate step to validate the effectiveness of our control algorithms prior to their implementation in the physical testbed. The IDS $3$D City also enables us to demonstrate that our control algorithms work independently of the underlying vehicle dynamics, as the vehicle dynamics introduced by AirSim operate at a different scale than our scaled smart city. Finally, we demonstrate the behavior of our digital environment by performing an experiment in both the virtual and physical environments and compare their outputs.