 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Transferable Motor Skills for Geometry-Aware Robotic Surface Tasks
May 24, 2026Robotic surface-interaction tasks, such as spray painting or welding, require both accurate geometric planning and precise motion execution. While modern motion planners generate valid geometric paths, they often lack the expert motor patterns observed in human operators. Conversely, learning from demonstration often tightly couples task execution to the specific training geometry, limiting transferability. We propose a modular framework that decouples geometric motion planning from execution-level expertise. Expert behavior is represented as a vocabulary of interpretable, atomic motor rules, such as velocity scaling and orientation offsets, that systematically modify a geometrically planned reference path. We train a multimodal neural network to infer rule parameters jointly from kinematic trajectory data and CAD model geometry. We evaluate our approach through dynamic simulation on L-shaped and window-shaped objects, demonstrating on simulated data that the model successfully extracts velocity and orientation rules across both topologies.
Beyond Behavior Cloning: Robustness through Interactive Imitation and Contrastive Learning
Feb 11, 2025Behavior cloning (BC) traditionally relies on demonstration data, assuming the demonstrated actions are optimal. This can lead to overfitting under noisy data, particularly when expressive models are used (e.g., the energy-based model in Implicit BC). To address this, we extend behavior cloning into an iterative process of optimal action estimation within the Interactive Imitation Learning framework. Specifically, we introduce Contrastive policy Learning from Interactive Corrections (CLIC). CLIC leverages human corrections to estimate a set of desired actions and optimizes the policy to select actions from this set. We provide theoretical guarantees for the convergence of the desired action set to optimal actions in both single and multiple optimal action cases. Extensive simulation and real-robot experiments validate CLIC's advantages over existing state-of-the-art methods, including stable training of energy-based models, robustness to feedback noise, and adaptability to diverse feedback types beyond demonstrations. Our code will be publicly available soon.
EAGERx: Graph-Based Framework for Sim2real Robot Learning
Jul 05, 2024



Sim2real, that is, the transfer of learned control policies from simulation to real world, is an area of growing interest in robotics due to its potential to efficiently handle complex tasks. The sim2real approach faces challenges due to mismatches between simulation and reality. These discrepancies arise from inaccuracies in modeling physical phenomena and asynchronous control, among other factors. To this end, we introduce EAGERx, a framework with a unified software pipeline for both real and simulated robot learning. It can support various simulators and aids in integrating state, action and time-scale abstractions to facilitate learning. EAGERx's integrated delay simulation, domain randomization features, and proposed synchronization algorithm contribute to narrowing the sim2real gap. We demonstrate (in the context of robot learning and beyond) the efficacy of EAGERx in accommodating diverse robotic systems and maintaining consistent simulation behavior. EAGERx is open source and its code is available at https://eagerx.readthedocs.io.
A Vision-Guided Robotic System for Grasping Harvested Tomato Trusses in Cluttered Environments
Sep 29, 2023



Currently, truss tomato weighing and packaging require significant manual work. The main obstacle to automation lies in the difficulty of developing a reliable robotic grasping system for already harvested trusses. We propose a method to grasp trusses that are stacked in a crate with considerable clutter, which is how they are commonly stored and transported after harvest. The method consists of a deep learning-based vision system to first identify the individual trusses in the crate and then determine a suitable grasping location on the stem. To this end, we have introduced a grasp pose ranking algorithm with online learning capabilities. After selecting the most promising grasp pose, the robot executes a pinch grasp without needing touch sensors or geometric models. Lab experiments with a robotic manipulator equipped with an eye-in-hand RGB-D camera showed a 100% clearance rate when tasked to pick all trusses from a pile. 93% of the trusses were successfully grasped on the first try, while the remaining 7% required more attempts.
Imitrob: Imitation Learning Dataset for Training and Evaluating 6D Object Pose Estimators
Sep 19, 2022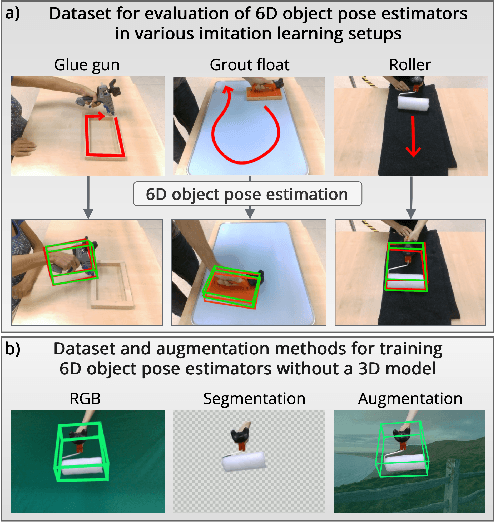
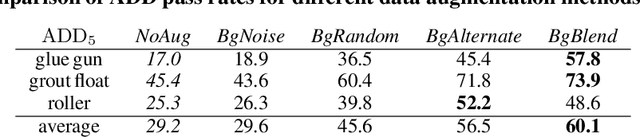
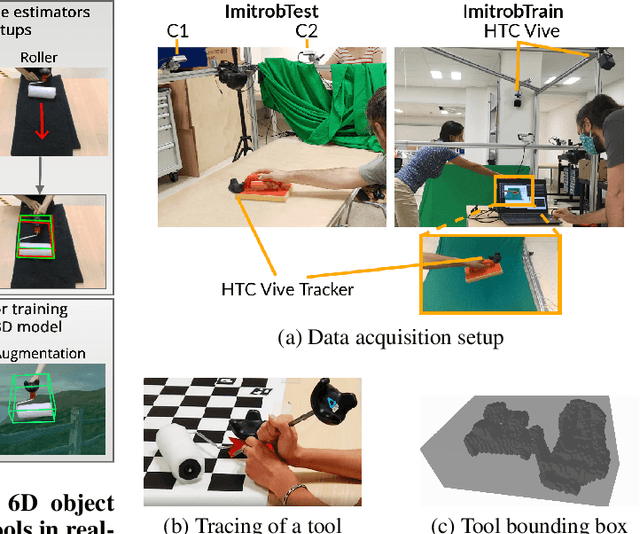
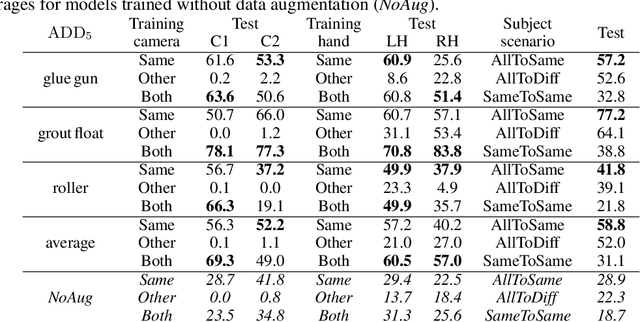
This paper introduces a dataset for training and evaluating methods for 6D pose estimation of hand-held tools in task demonstrations captured by a standard RGB camera. Despite the significant progress of 6D pose estimation methods, their performance is usually limited for heavily occluded objects, which is a common case in imitation learning where the object is typically partially occluded by the manipulating hand. Currently, there is a lack of datasets that would enable the development of robust 6D pose estimation methods for these conditions. To overcome this problem, we collect a new dataset (Imitrob) aimed at 6D pose estimation in imitation learning and other applications where a human holds a tool and performs a task. The dataset contains image sequences of three different tools and six manipulation tasks with two camera viewpoints, four human subjects, and left/right hand. Each image is accompanied by an accurate ground truth measurement of the 6D object pose, obtained by the HTC Vive motion tracking device. The use of the dataset is demonstrated by training and evaluating a recent 6D object pose estimation method (DOPE) in various setups. The dataset and code are publicly available at http://imitrob.ciirc.cvut.cz/imitrobdataset.php.
Geometry-Based Grasping of Vine Tomatoes
Mar 01, 2021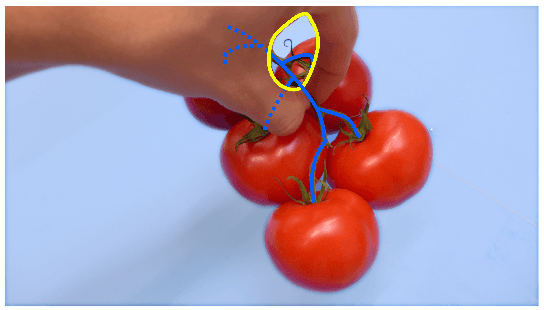
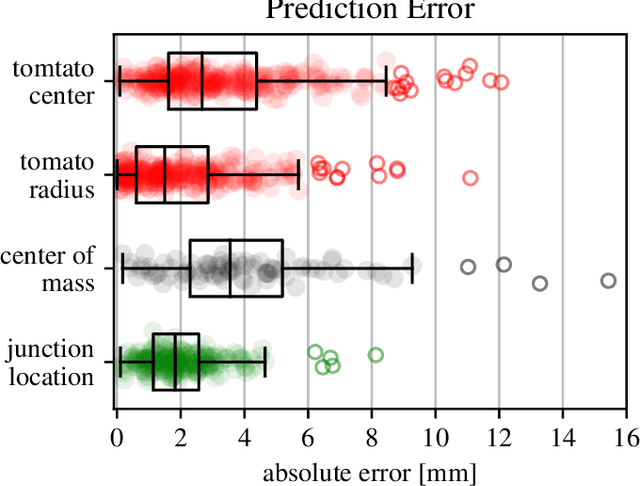
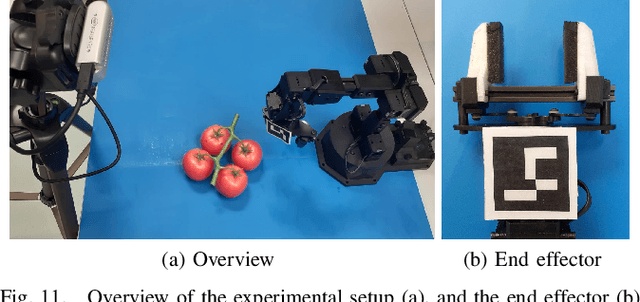
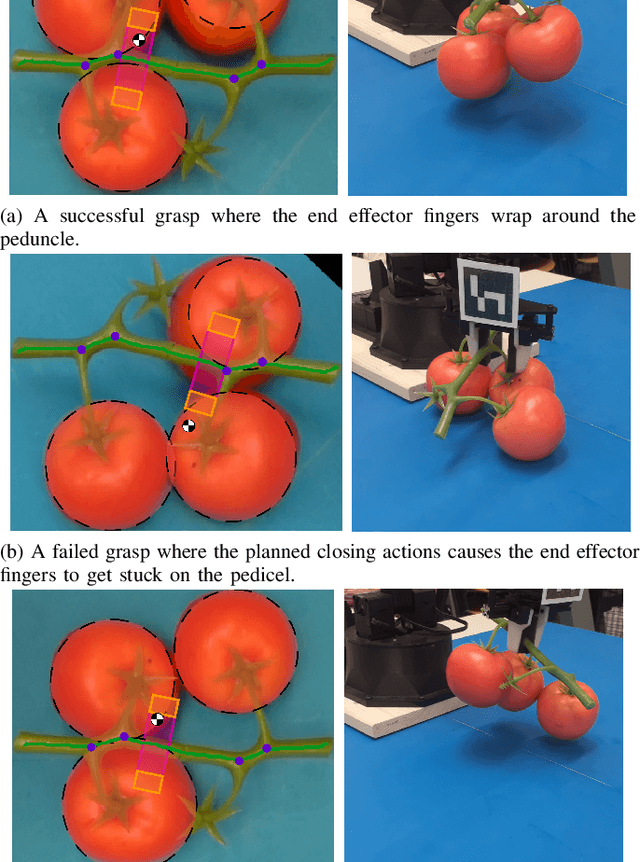
We propose a geometry-based grasping method for vine tomatoes. It relies on a computer-vision pipeline to identify the required geometric features of the tomatoes and of the truss stem. The grasping method then uses a geometric model of the robotic hand and the truss to determine a suitable grasping location on the stem. This approach allows for grasping tomato trusses without requiring delicate contact sensors or complex mechanistic models and under minimal risk of damaging the tomatoes. Lab experiments were conducted to validate the proposed methods, using an RGB-D camera and a low-cost robotic manipulator. The success rate was 83% to 92%, depending on the type of truss.
GEM: Glare or Gloom, I Can Still See You -- End-to-End Multimodal Object Detector
Feb 24, 2021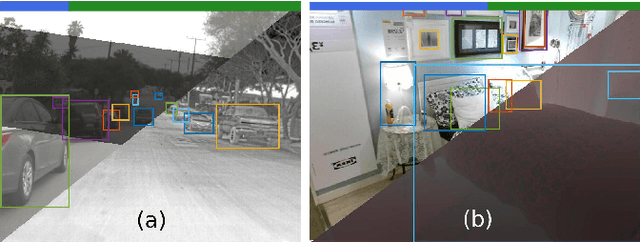
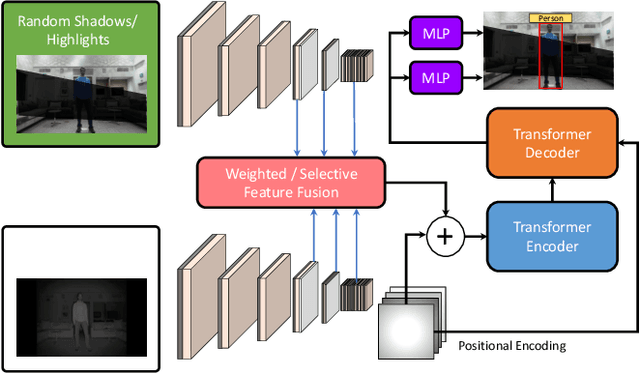
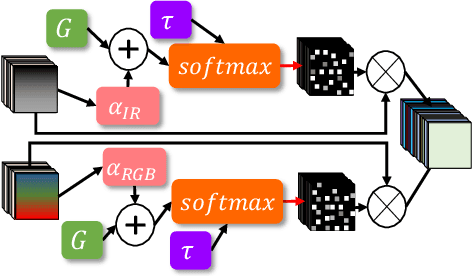
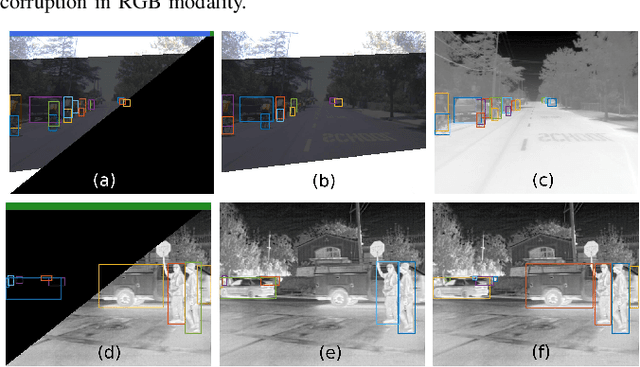
Deep neural networks designed for vision tasks are often prone to failure when they encounter environmental conditions not covered by the training data. Efficient fusion strategies for multi-sensor configurations can enhance the robustness of the detection algorithms by exploiting redundancy from different sensor streams. In this paper, we propose sensor-aware multi-modal fusion strategies for 2D object detection in harsh-lighting conditions. Our network learns to estimate the measurement reliability of each sensor modality in the form of scalar weights and masks, without prior knowledge of the sensor characteristics. The obtained weights are assigned to the extracted feature maps which are subsequently fused and passed to the transformer encoder-decoder network for object detection. This is critical in the case of asymmetric sensor failures and to prevent any tragic consequences. Through extensive experimentation, we show that the proposed strategies out-perform the existing state-of-the-art methods on the FLIR-Thermal dataset, improving the mAP up-to 25.2%. We also propose a new "r-blended" hybrid depth modality for RGB-D multi-modal detection tasks. Our proposed method also obtained promising results on the SUNRGB-D dataset.
DeepKoCo: Efficient latent planning with an invariant Koopman representation
Nov 25, 2020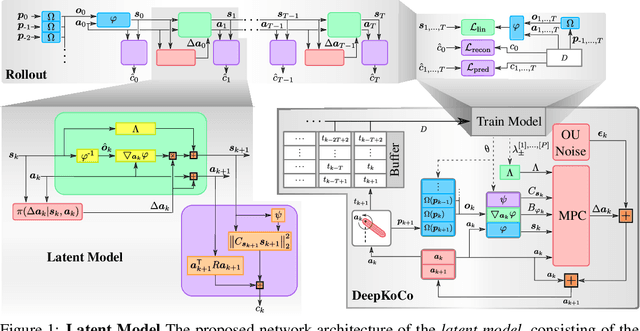
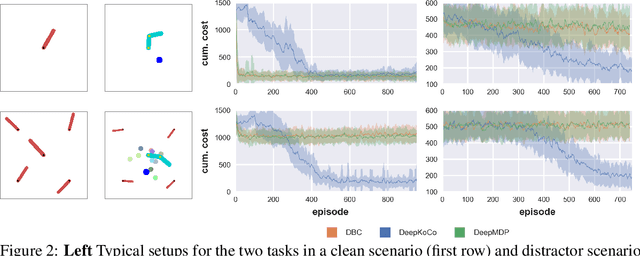
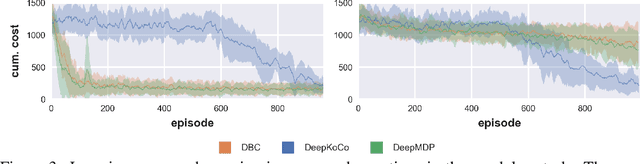
This paper presents DeepKoCo, a novel model-based agent that learns a latent Koopman representation from images. This representation allows DeepKoCo to plan efficiently using linear control methods, such as linear model predictive control. Compared to traditional agents, DeepKoCo is invariant to task-irrelevant dynamics, thanks to the use of a tailored lossy autoencoder network that allows DeepKoCo to learn latent dynamics that reconstruct and predict only observed costs, rather than all observed dynamics. As our results show, DeepKoCo achieves a similar final performance as traditional model-free methods on complex control tasks, while being considerably more robust to distractor dynamics, making the proposed agent more amenable for real-life applications.
Teaching robots to imitate a human with no on-teacher sensors. What are the key challenges?
Jan 24, 2019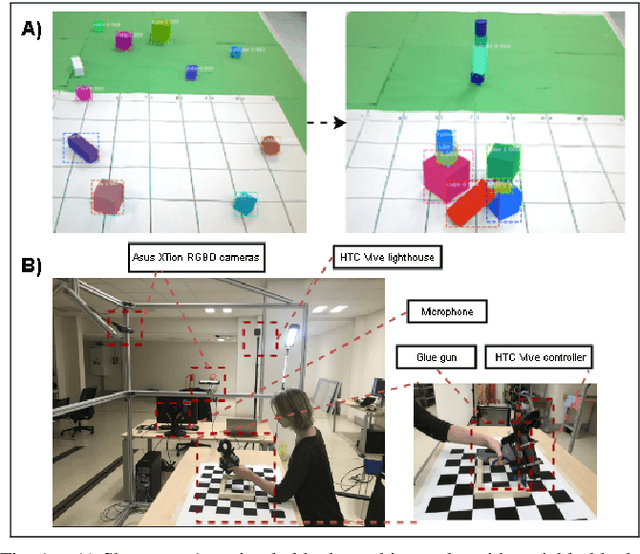
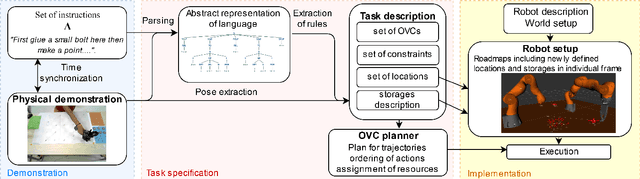
In this paper, we consider the problem of learning object manipulation tasks from human demonstration using RGB or RGB-D cameras. We highlight the key challenges in capturing sufficiently good data with no tracking devices - starting from sensor selection and accurate 6DoF pose estimation to natural language processing. In particular, we focus on two showcases: gluing task with a glue gun and simple block-stacking with variable blocks. Furthermore, we discuss how a linguistic description of the task could help to improve the accuracy of task description. We also present the whole architecture of our transfer of the imitated task to the simulated and real robot environment.
Reinforcement Learning Applied to an Electric Water Heater: From Theory to Practice
Nov 29, 2015
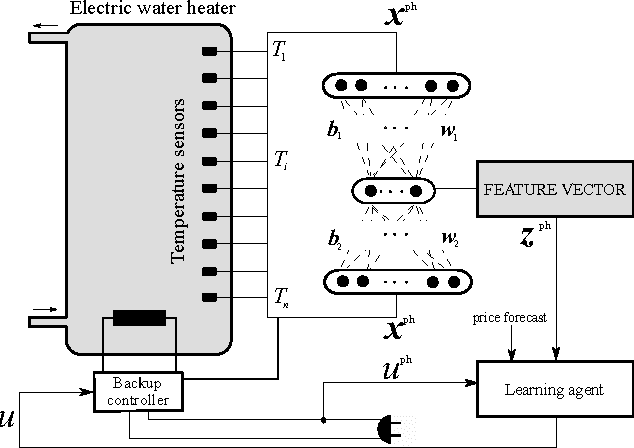
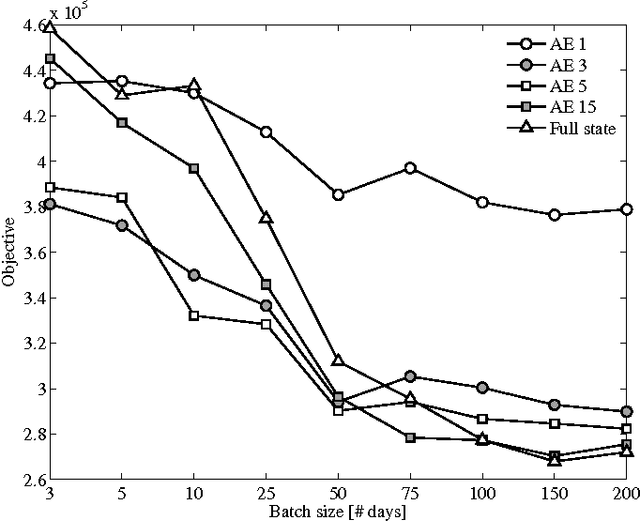
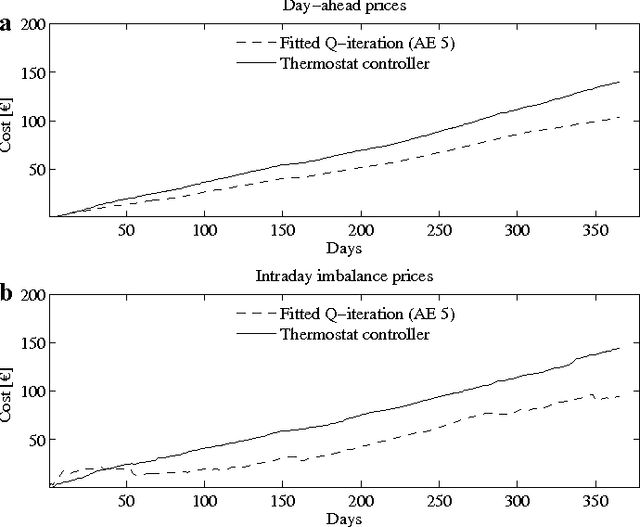
Electric water heaters have the ability to store energy in their water buffer without impacting the comfort of the end user. This feature makes them a prime candidate for residential demand response. However, the stochastic and nonlinear dynamics of electric water heaters, makes it challenging to harness their flexibility. Driven by this challenge, this paper formulates the underlying sequential decision-making problem as a Markov decision process and uses techniques from reinforcement learning. Specifically, we apply an auto-encoder network to find a compact feature representation of the sensor measurements, which helps to mitigate the curse of dimensionality. A wellknown batch reinforcement learning technique, fitted Q-iteration, is used to find a control policy, given this feature representation. In a simulation-based experiment using an electric water heater with 50 temperature sensors, the proposed method was able to achieve good policies much faster than when using the full state information. In a lab experiment, we apply fitted Q-iteration to an electric water heater with eight temperature sensors. Further reducing the state vector did not improve the results of fitted Q-iteration. The results of the lab experiment, spanning 40 days, indicate that compared to a thermostat controller, the presented approach was able to reduce the total cost of energy consumption of the electric water heater by 15%.