 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlgorithmic Audit of Personalisation Drift in Polarising Topics on TikTok
Mar 21, 2026Social media platforms have become an integral part of everyday life, serving as a primary source of news and information for many users. These platforms increasingly rely on personalised recommendation systems that shape what users see and engage with. While these systems are optimised for engagement, concerns have emerged that they may also drive users toward more polarised perspectives, particularly in contested domains such as politics, climate change, vaccines, and conspiracy theories. In this paper, we present an algorithmic audit of personalisation drift on TikTok in these polarising topics. Using controlled accounts designed to simulate users with interests aligned with or opposed to different polarising topics, we systematically measure the extent to which TikTok steers content exposure toward specific topics and polarities over time. Specifically, we investigated: 1) a preference-aligned drift (showing a strong personalisation towards user interests), 2) a polarisation-topic drift (showing a strong neutralising effect for misinformation-themed topics, and a high preference and reinforcement of interest of US politic topic); and 3) a polarisation-stance drift (showing a preference of oppose stance towards US politics topic and a general reinforcement of users' stance by recommending items aligned with their stance towards polarising topics). Overall, our findings provide evidence that recommendation trajectories differ markedly across topics, with some pathways amplifying polarised viewpoints more strongly than others and offer insights for platform governance, transparency and user awareness.
Imitrob: Imitation Learning Dataset for Training and Evaluating 6D Object Pose Estimators
Sep 19, 2022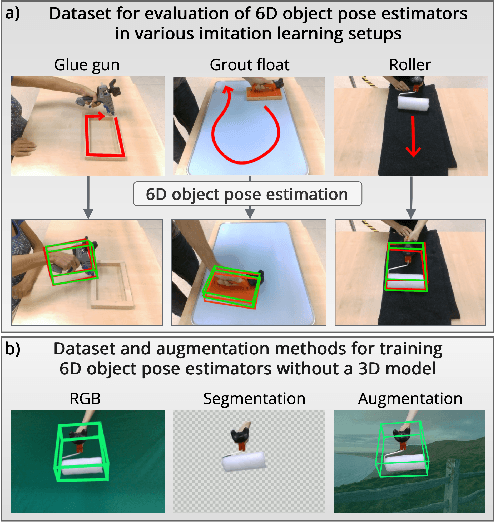
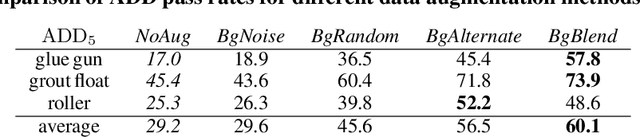
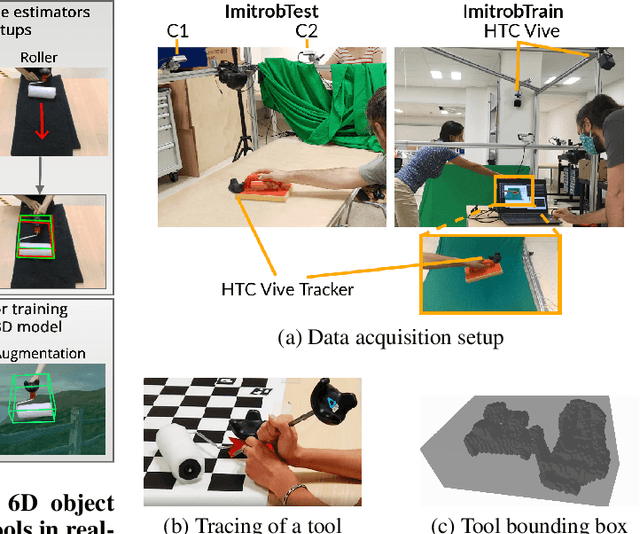
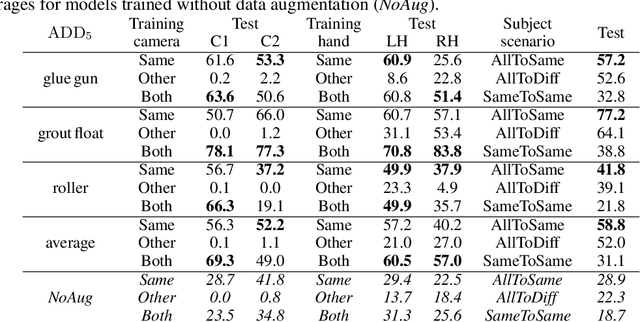
This paper introduces a dataset for training and evaluating methods for 6D pose estimation of hand-held tools in task demonstrations captured by a standard RGB camera. Despite the significant progress of 6D pose estimation methods, their performance is usually limited for heavily occluded objects, which is a common case in imitation learning where the object is typically partially occluded by the manipulating hand. Currently, there is a lack of datasets that would enable the development of robust 6D pose estimation methods for these conditions. To overcome this problem, we collect a new dataset (Imitrob) aimed at 6D pose estimation in imitation learning and other applications where a human holds a tool and performs a task. The dataset contains image sequences of three different tools and six manipulation tasks with two camera viewpoints, four human subjects, and left/right hand. Each image is accompanied by an accurate ground truth measurement of the 6D object pose, obtained by the HTC Vive motion tracking device. The use of the dataset is demonstrated by training and evaluating a recent 6D object pose estimation method (DOPE) in various setups. The dataset and code are publicly available at http://imitrob.ciirc.cvut.cz/imitrobdataset.php.