 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDon't Decay the Learning Rate, Increase the Batch Size
Feb 24, 2018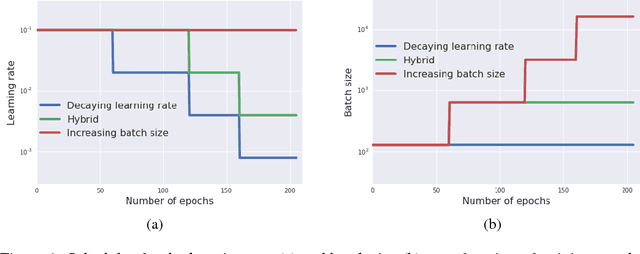
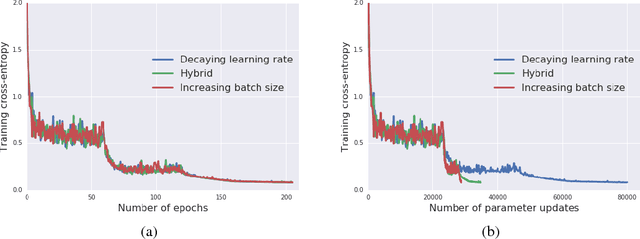
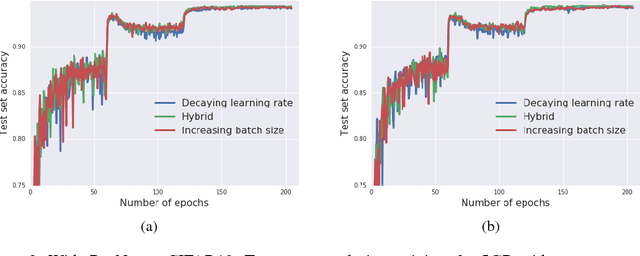
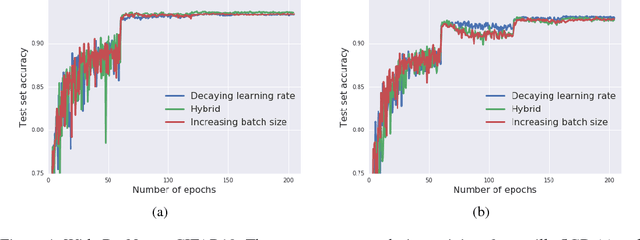
It is common practice to decay the learning rate. Here we show one can usually obtain the same learning curve on both training and test sets by instead increasing the batch size during training. This procedure is successful for stochastic gradient descent (SGD), SGD with momentum, Nesterov momentum, and Adam. It reaches equivalent test accuracies after the same number of training epochs, but with fewer parameter updates, leading to greater parallelism and shorter training times. We can further reduce the number of parameter updates by increasing the learning rate $\epsilon$ and scaling the batch size $B \propto \epsilon$. Finally, one can increase the momentum coefficient $m$ and scale $B \propto 1/(1-m)$, although this tends to slightly reduce the test accuracy. Crucially, our techniques allow us to repurpose existing training schedules for large batch training with no hyper-parameter tuning. We train ResNet-50 on ImageNet to $76.1\%$ validation accuracy in under 30 minutes.
Unsupervised Pretraining for Sequence to Sequence Learning
Feb 22, 2018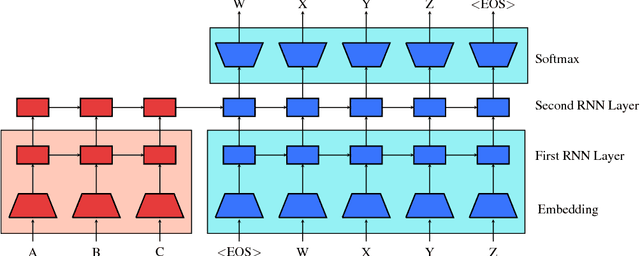
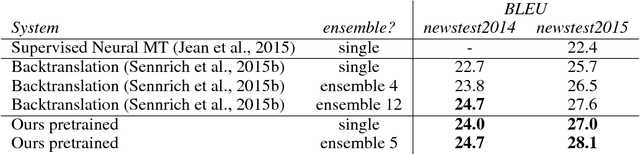
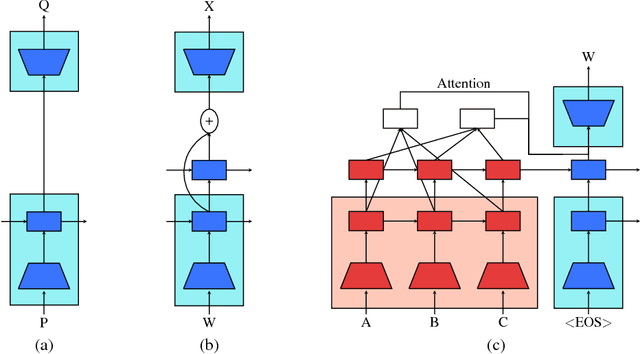
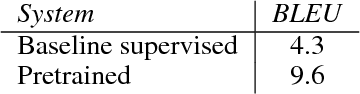
This work presents a general unsupervised learning method to improve the accuracy of sequence to sequence (seq2seq) models. In our method, the weights of the encoder and decoder of a seq2seq model are initialized with the pretrained weights of two language models and then fine-tuned with labeled data. We apply this method to challenging benchmarks in machine translation and abstractive summarization and find that it significantly improves the subsequent supervised models. Our main result is that pretraining improves the generalization of seq2seq models. We achieve state-of-the art results on the WMT English$\rightarrow$German task, surpassing a range of methods using both phrase-based machine translation and neural machine translation. Our method achieves a significant improvement of 1.3 BLEU from the previous best models on both WMT'14 and WMT'15 English$\rightarrow$German. We also conduct human evaluations on abstractive summarization and find that our method outperforms a purely supervised learning baseline in a statistically significant manner.
A Bayesian Perspective on Generalization and Stochastic Gradient Descent
Feb 14, 2018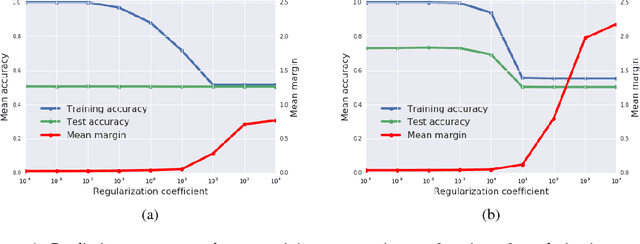
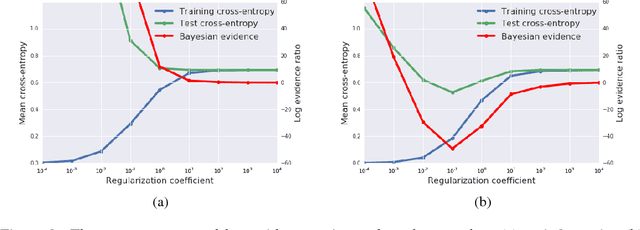
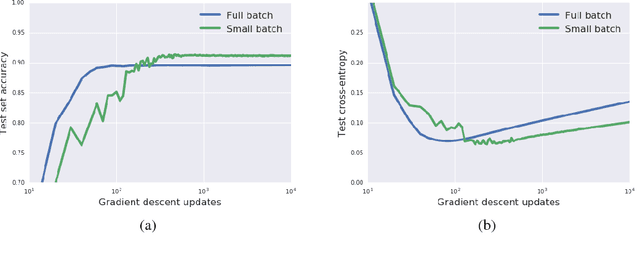
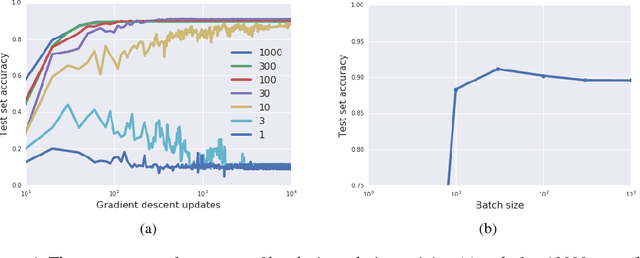
We consider two questions at the heart of machine learning; how can we predict if a minimum will generalize to the test set, and why does stochastic gradient descent find minima that generalize well? Our work responds to Zhang et al. (2016), who showed deep neural networks can easily memorize randomly labeled training data, despite generalizing well on real labels of the same inputs. We show that the same phenomenon occurs in small linear models. These observations are explained by the Bayesian evidence, which penalizes sharp minima but is invariant to model parameterization. We also demonstrate that, when one holds the learning rate fixed, there is an optimum batch size which maximizes the test set accuracy. We propose that the noise introduced by small mini-batches drives the parameters towards minima whose evidence is large. Interpreting stochastic gradient descent as a stochastic differential equation, we identify the "noise scale" $g = \epsilon (\frac{N}{B} - 1) \approx \epsilon N/B$, where $\epsilon$ is the learning rate, $N$ the training set size and $B$ the batch size. Consequently the optimum batch size is proportional to both the learning rate and the size of the training set, $B_{opt} \propto \epsilon N$. We verify these predictions empirically.
Efficient Neural Architecture Search via Parameter Sharing
Feb 12, 2018
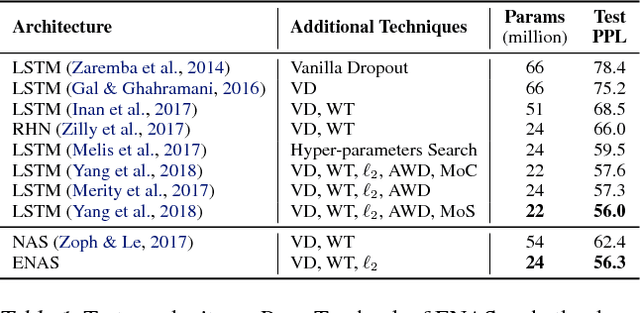
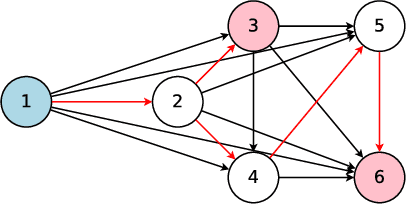
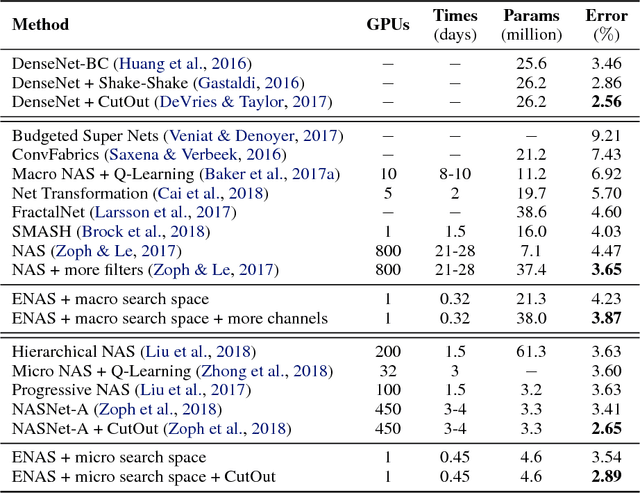
We propose Efficient Neural Architecture Search (ENAS), a fast and inexpensive approach for automatic model design. In ENAS, a controller learns to discover neural network architectures by searching for an optimal subgraph within a large computational graph. The controller is trained with policy gradient to select a subgraph that maximizes the expected reward on the validation set. Meanwhile the model corresponding to the selected subgraph is trained to minimize a canonical cross entropy loss. Thanks to parameter sharing between child models, ENAS is fast: it delivers strong empirical performances using much fewer GPU-hours than all existing automatic model design approaches, and notably, 1000x less expensive than standard Neural Architecture Search. On the Penn Treebank dataset, ENAS discovers a novel architecture that achieves a test perplexity of 55.8, establishing a new state-of-the-art among all methods without post-training processing. On the CIFAR-10 dataset, ENAS designs novel architectures that achieve a test error of 2.89%, which is on par with NASNet (Zoph et al., 2018), whose test error is 2.65%.
Intriguing Properties of Adversarial Examples
Nov 08, 2017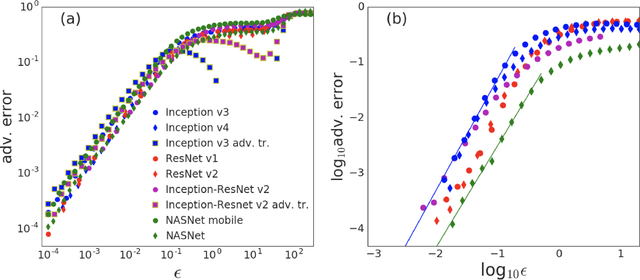

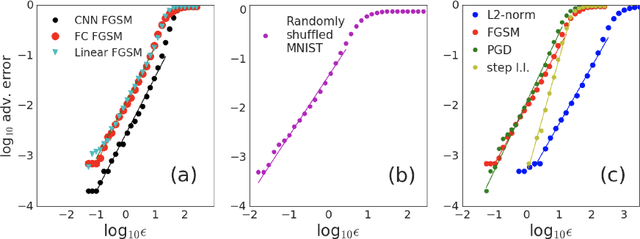
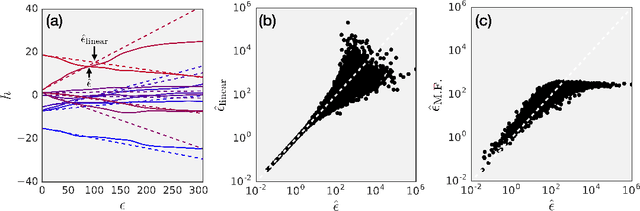
It is becoming increasingly clear that many machine learning classifiers are vulnerable to adversarial examples. In attempting to explain the origin of adversarial examples, previous studies have typically focused on the fact that neural networks operate on high dimensional data, they overfit, or they are too linear. Here we argue that the origin of adversarial examples is primarily due to an inherent uncertainty that neural networks have about their predictions. We show that the functional form of this uncertainty is independent of architecture, dataset, and training protocol; and depends only on the statistics of the logit differences of the network, which do not change significantly during training. This leads to adversarial error having a universal scaling, as a power-law, with respect to the size of the adversarial perturbation. We show that this universality holds for a broad range of datasets (MNIST, CIFAR10, ImageNet, and random data), models (including state-of-the-art deep networks, linear models, adversarially trained networks, and networks trained on randomly shuffled labels), and attacks (FGSM, step l.l., PGD). Motivated by these results, we study the effects of reducing prediction entropy on adversarial robustness. Finally, we study the effect of network architectures on adversarial sensitivity. To do this, we use neural architecture search with reinforcement learning to find adversarially robust architectures on CIFAR10. Our resulting architecture is more robust to white \emph{and} black box attacks compared to previous attempts.
Searching for Activation Functions
Oct 27, 2017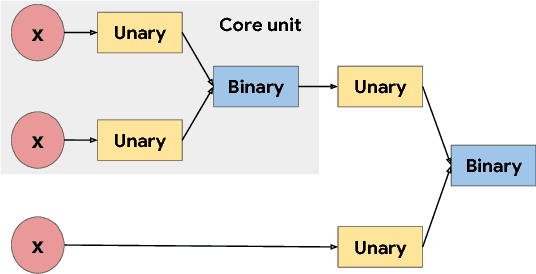
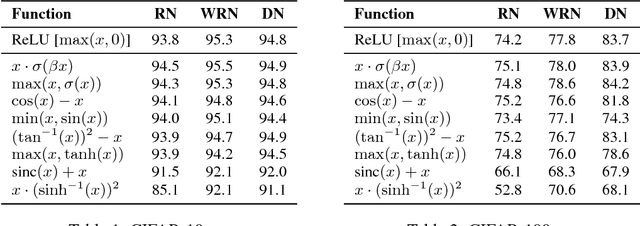
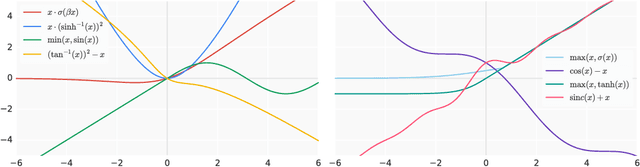
The choice of activation functions in deep networks has a significant effect on the training dynamics and task performance. Currently, the most successful and widely-used activation function is the Rectified Linear Unit (ReLU). Although various hand-designed alternatives to ReLU have been proposed, none have managed to replace it due to inconsistent gains. In this work, we propose to leverage automatic search techniques to discover new activation functions. Using a combination of exhaustive and reinforcement learning-based search, we discover multiple novel activation functions. We verify the effectiveness of the searches by conducting an empirical evaluation with the best discovered activation function. Our experiments show that the best discovered activation function, $f(x) = x \cdot \text{sigmoid}(\beta x)$, which we name Swish, tends to work better than ReLU on deeper models across a number of challenging datasets. For example, simply replacing ReLUs with Swish units improves top-1 classification accuracy on ImageNet by 0.9\% for Mobile NASNet-A and 0.6\% for Inception-ResNet-v2. The simplicity of Swish and its similarity to ReLU make it easy for practitioners to replace ReLUs with Swish units in any neural network.
Neural Optimizer Search with Reinforcement Learning
Sep 22, 2017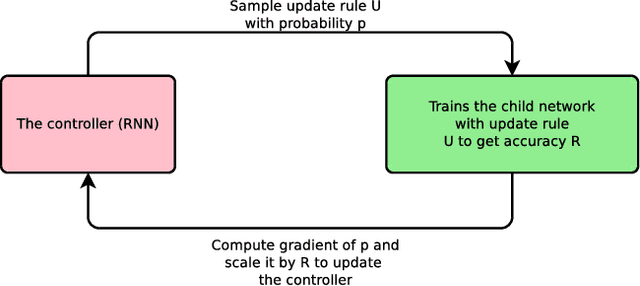
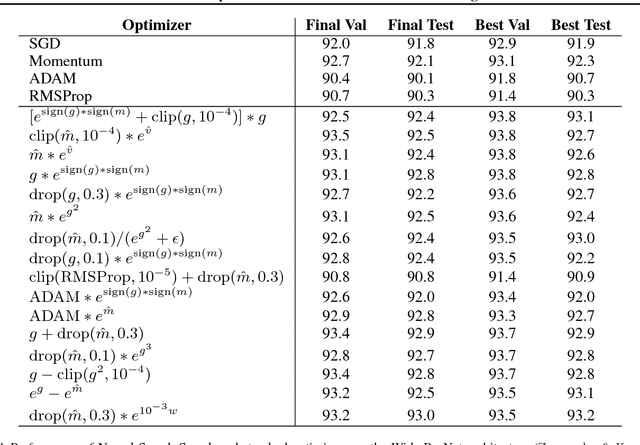
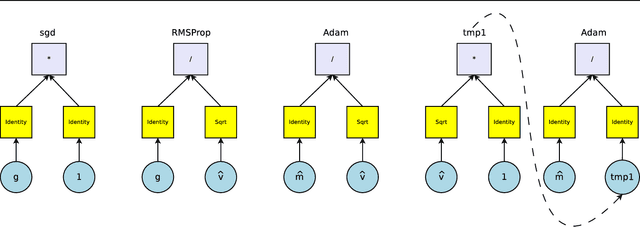
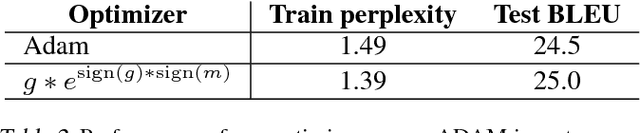
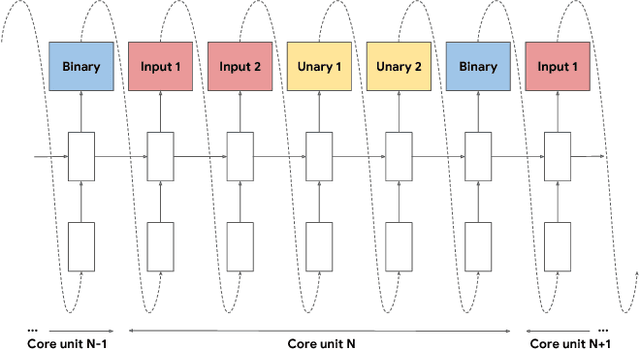
We present an approach to automate the process of discovering optimization methods, with a focus on deep learning architectures. We train a Recurrent Neural Network controller to generate a string in a domain specific language that describes a mathematical update equation based on a list of primitive functions, such as the gradient, running average of the gradient, etc. The controller is trained with Reinforcement Learning to maximize the performance of a model after a few epochs. On CIFAR-10, our method discovers several update rules that are better than many commonly used optimizers, such as Adam, RMSProp, or SGD with and without Momentum on a ConvNet model. We introduce two new optimizers, named PowerSign and AddSign, which we show transfer well and improve training on a variety of different tasks and architectures, including ImageNet classification and Google's neural machine translation system.
Google's Multilingual Neural Machine Translation System: Enabling Zero-Shot Translation
Aug 21, 2017We propose a simple solution to use a single Neural Machine Translation (NMT) model to translate between multiple languages. Our solution requires no change in the model architecture from our base system but instead introduces an artificial token at the beginning of the input sentence to specify the required target language. The rest of the model, which includes encoder, decoder and attention, remains unchanged and is shared across all languages. Using a shared wordpiece vocabulary, our approach enables Multilingual NMT using a single model without any increase in parameters, which is significantly simpler than previous proposals for Multilingual NMT. Our method often improves the translation quality of all involved language pairs, even while keeping the total number of model parameters constant. On the WMT'14 benchmarks, a single multilingual model achieves comparable performance for English$\rightarrow$French and surpasses state-of-the-art results for English$\rightarrow$German. Similarly, a single multilingual model surpasses state-of-the-art results for French$\rightarrow$English and German$\rightarrow$English on WMT'14 and WMT'15 benchmarks respectively. On production corpora, multilingual models of up to twelve language pairs allow for better translation of many individual pairs. In addition to improving the translation quality of language pairs that the model was trained with, our models can also learn to perform implicit bridging between language pairs never seen explicitly during training, showing that transfer learning and zero-shot translation is possible for neural translation. Finally, we show analyses that hints at a universal interlingua representation in our models and show some interesting examples when mixing languages.
Device Placement Optimization with Reinforcement Learning
Jun 25, 2017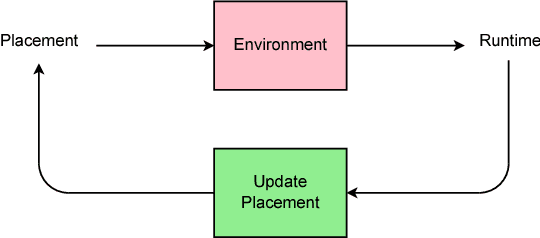
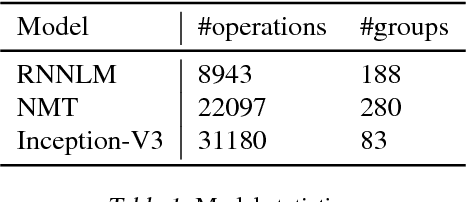
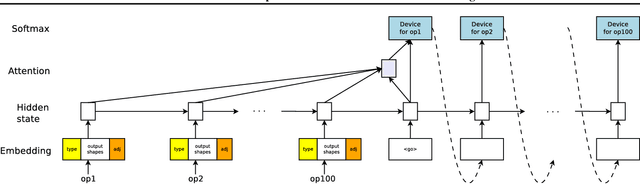
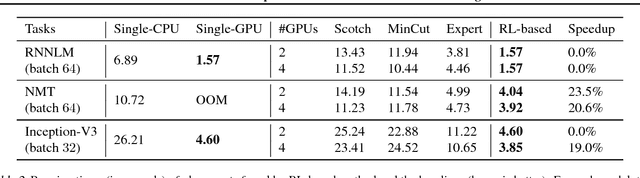
The past few years have witnessed a growth in size and computational requirements for training and inference with neural networks. Currently, a common approach to address these requirements is to use a heterogeneous distributed environment with a mixture of hardware devices such as CPUs and GPUs. Importantly, the decision of placing parts of the neural models on devices is often made by human experts based on simple heuristics and intuitions. In this paper, we propose a method which learns to optimize device placement for TensorFlow computational graphs. Key to our method is the use of a sequence-to-sequence model to predict which subsets of operations in a TensorFlow graph should run on which of the available devices. The execution time of the predicted placements is then used as the reward signal to optimize the parameters of the sequence-to-sequence model. Our main result is that on Inception-V3 for ImageNet classification, and on RNN LSTM, for language modeling and neural machine translation, our model finds non-trivial device placements that outperform hand-crafted heuristics and traditional algorithmic methods.
Learning to Skim Text
Apr 29, 2017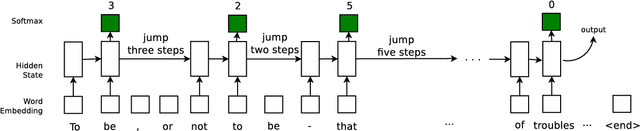

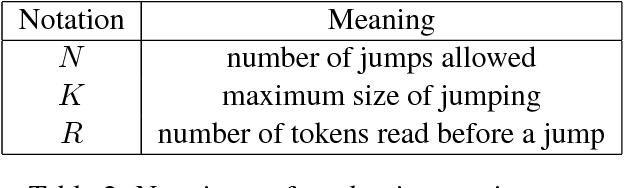
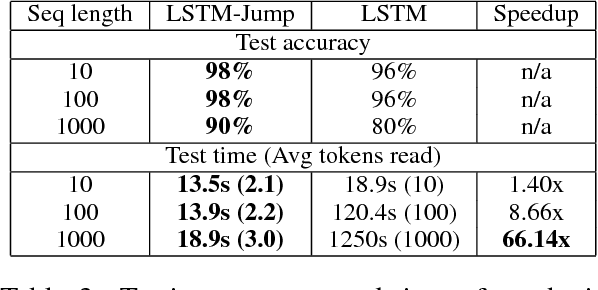
Recurrent Neural Networks are showing much promise in many sub-areas of natural language processing, ranging from document classification to machine translation to automatic question answering. Despite their promise, many recurrent models have to read the whole text word by word, making it slow to handle long documents. For example, it is difficult to use a recurrent network to read a book and answer questions about it. In this paper, we present an approach of reading text while skipping irrelevant information if needed. The underlying model is a recurrent network that learns how far to jump after reading a few words of the input text. We employ a standard policy gradient method to train the model to make discrete jumping decisions. In our benchmarks on four different tasks, including number prediction, sentiment analysis, news article classification and automatic Q\&A, our proposed model, a modified LSTM with jumping, is up to 6 times faster than the standard sequential LSTM, while maintaining the same or even better accuracy.