 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJukebox: A Generative Model for Music
Apr 30, 2020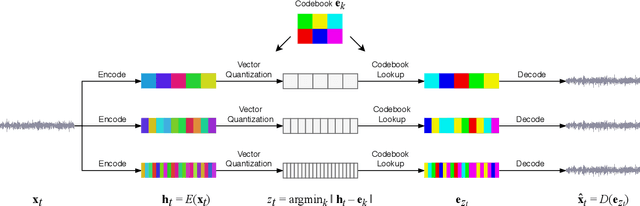
We introduce Jukebox, a model that generates music with singing in the raw audio domain. We tackle the long context of raw audio using a multi-scale VQ-VAE to compress it to discrete codes, and modeling those using autoregressive Transformers. We show that the combined model at scale can generate high-fidelity and diverse songs with coherence up to multiple minutes. We can condition on artist and genre to steer the musical and vocal style, and on unaligned lyrics to make the singing more controllable. We are releasing thousands of non cherry-picked samples at https://jukebox.openai.com, along with model weights and code at https://github.com/openai/jukebox
Glow: Generative Flow with Invertible 1x1 Convolutions
Jul 10, 2018
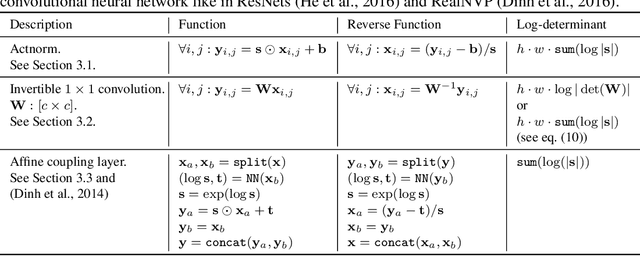
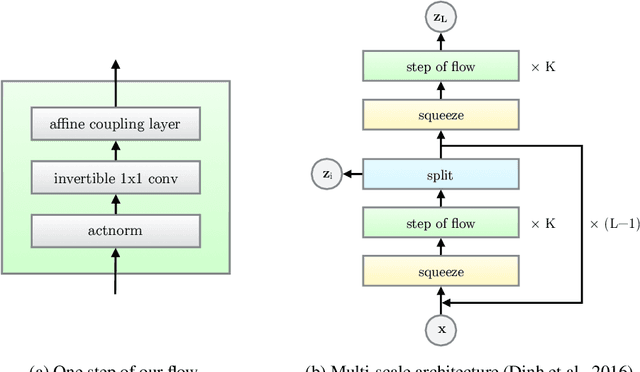
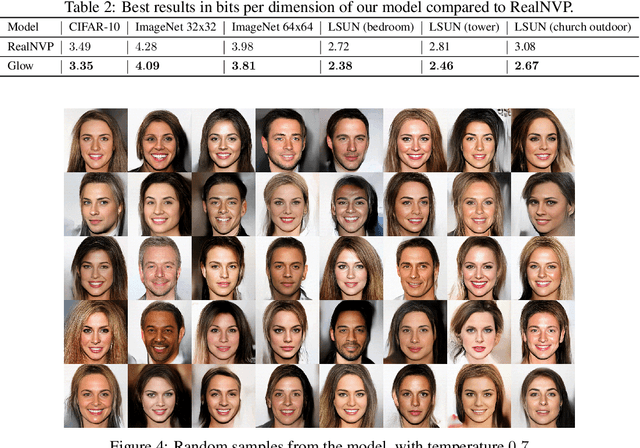
Flow-based generative models (Dinh et al., 2014) are conceptually attractive due to tractability of the exact log-likelihood, tractability of exact latent-variable inference, and parallelizability of both training and synthesis. In this paper we propose Glow, a simple type of generative flow using an invertible 1x1 convolution. Using our method we demonstrate a significant improvement in log-likelihood on standard benchmarks. Perhaps most strikingly, we demonstrate that a generative model optimized towards the plain log-likelihood objective is capable of efficient realistic-looking synthesis and manipulation of large images. The code for our model is available at https://github.com/openai/glow
GamePad: A Learning Environment for Theorem Proving
Jun 02, 2018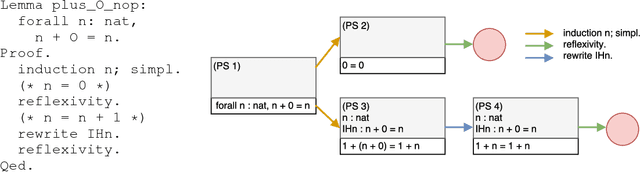
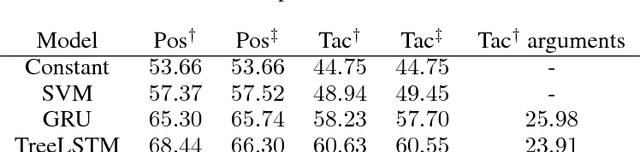
In this paper, we introduce a system called GamePad that can be used to explore the application of machine learning methods to theorem proving in the Coq proof assistant. Interactive theorem provers such as Coq enable users to construct machine-checkable proofs in a step-by-step manner. Hence, they provide an opportunity to explore theorem proving at a human level of abstraction. We use GamePad to synthesize proofs for a simple algebraic rewrite problem and train baseline models for a formalization of the Feit-Thompson theorem. We address position evaluation (i.e., predict the number of proof steps left) and tactic prediction (i.e., predict the next proof step) tasks, which arise naturally in human-level theorem proving.
Parameter Space Noise for Exploration
Jan 31, 2018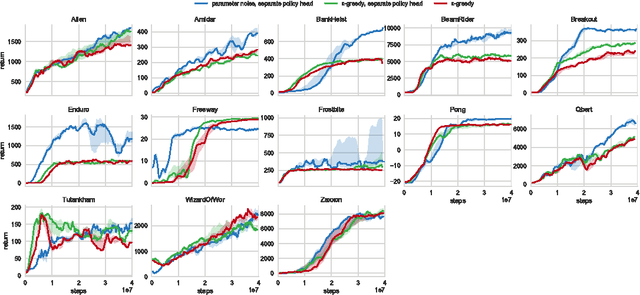
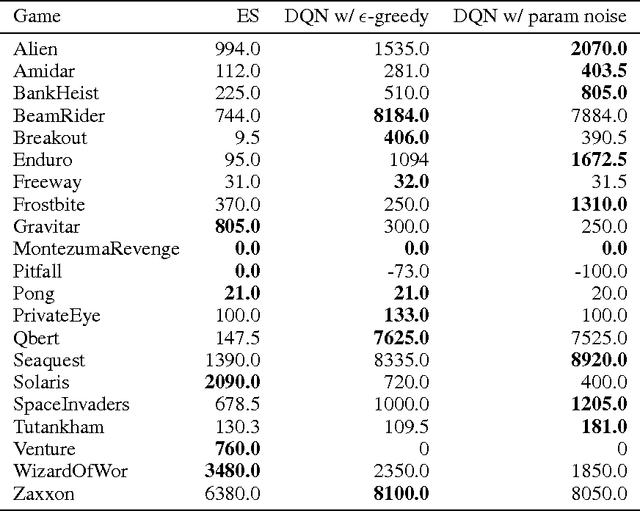
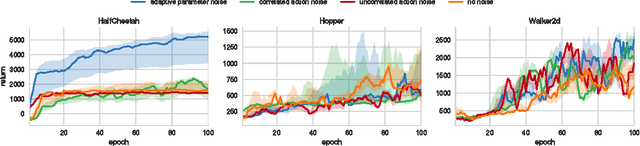
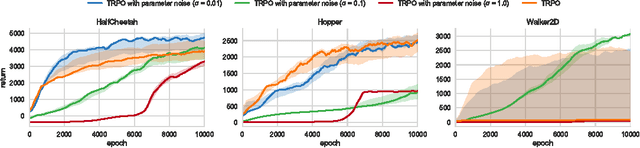
Deep reinforcement learning (RL) methods generally engage in exploratory behavior through noise injection in the action space. An alternative is to add noise directly to the agent's parameters, which can lead to more consistent exploration and a richer set of behaviors. Methods such as evolutionary strategies use parameter perturbations, but discard all temporal structure in the process and require significantly more samples. Combining parameter noise with traditional RL methods allows to combine the best of both worlds. We demonstrate that both off- and on-policy methods benefit from this approach through experimental comparison of DQN, DDPG, and TRPO on high-dimensional discrete action environments as well as continuous control tasks. Our results show that RL with parameter noise learns more efficiently than traditional RL with action space noise and evolutionary strategies individually.
Proximal Policy Optimization Algorithms
Aug 28, 2017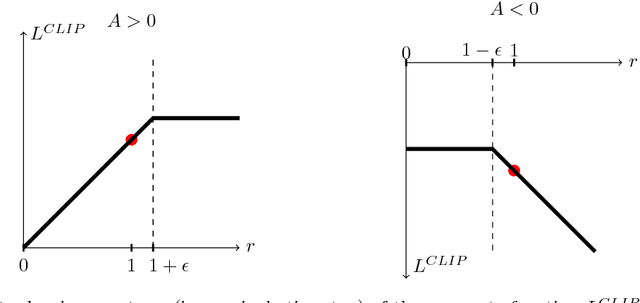
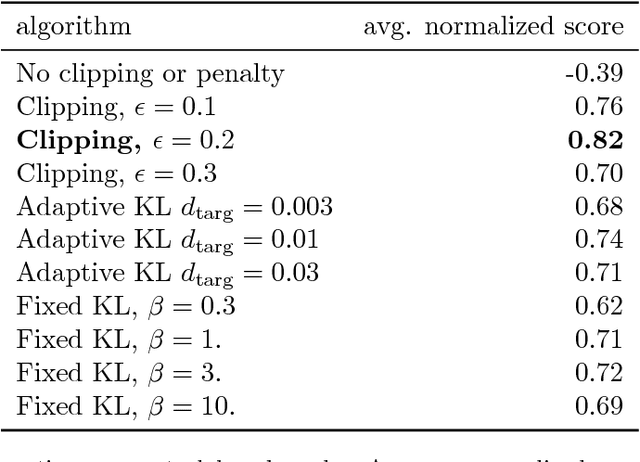
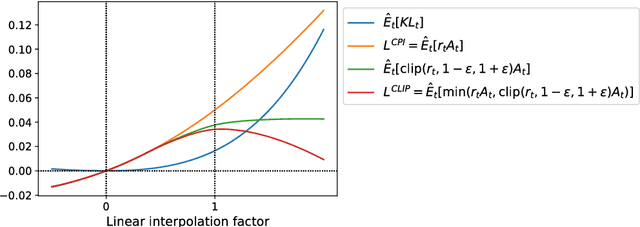

We propose a new family of policy gradient methods for reinforcement learning, which alternate between sampling data through interaction with the environment, and optimizing a "surrogate" objective function using stochastic gradient ascent. Whereas standard policy gradient methods perform one gradient update per data sample, we propose a novel objective function that enables multiple epochs of minibatch updates. The new methods, which we call proximal policy optimization (PPO), have some of the benefits of trust region policy optimization (TRPO), but they are much simpler to implement, more general, and have better sample complexity (empirically). Our experiments test PPO on a collection of benchmark tasks, including simulated robotic locomotion and Atari game playing, and we show that PPO outperforms other online policy gradient methods, and overall strikes a favorable balance between sample complexity, simplicity, and wall-time.
Variational Lossy Autoencoder
Mar 04, 2017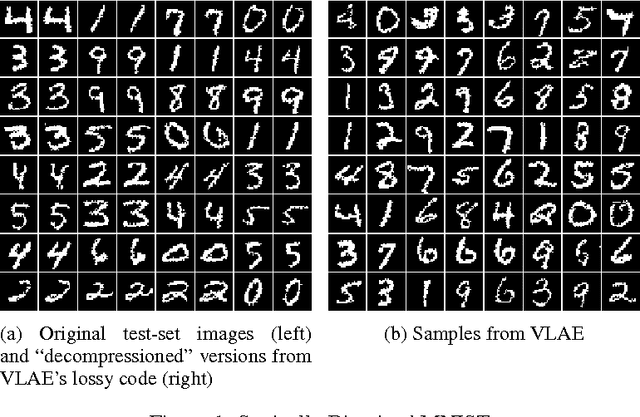
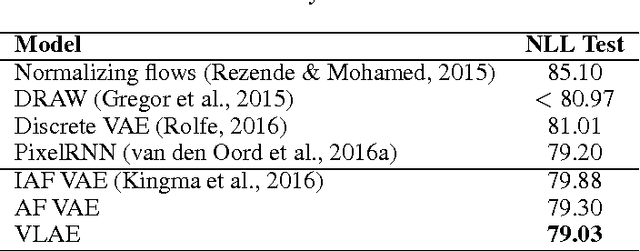
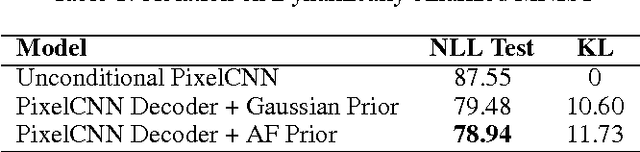
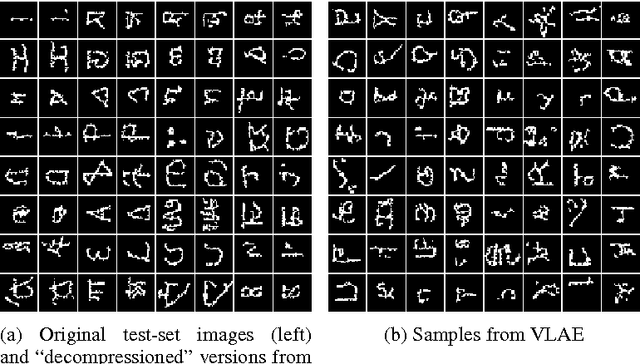
Representation learning seeks to expose certain aspects of observed data in a learned representation that's amenable to downstream tasks like classification. For instance, a good representation for 2D images might be one that describes only global structure and discards information about detailed texture. In this paper, we present a simple but principled method to learn such global representations by combining Variational Autoencoder (VAE) with neural autoregressive models such as RNN, MADE and PixelRNN/CNN. Our proposed VAE model allows us to have control over what the global latent code can learn and , by designing the architecture accordingly, we can force the global latent code to discard irrelevant information such as texture in 2D images, and hence the VAE only "autoencodes" data in a lossy fashion. In addition, by leveraging autoregressive models as both prior distribution $p(z)$ and decoding distribution $p(x|z)$, we can greatly improve generative modeling performance of VAEs, achieving new state-of-the-art results on MNIST, OMNIGLOT and Caltech-101 Silhouettes density estimation tasks.