 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Foresight for Robotic Stow: A Diffusion-Based World Model from Sparse Snapshots
Feb 12, 2026Automated warehouses execute millions of stow operations, where robots place objects into storage bins. For these systems it is valuable to anticipate how a bin will look from the current observations and the planned stow behavior before real execution. We propose FOREST, a stow-intent-conditioned world model that represents bin states as item-aligned instance masks and uses a latent diffusion transformer to predict the post-stow configuration from the observed context. Our evaluation shows that FOREST substantially improves the geometric agreement between predicted and true post-stow layouts compared with heuristic baselines. We further evaluate the predicted post-stow layouts in two downstream tasks, in which replacing the real post-stow masks with FOREST predictions causes only modest performance loss in load-quality assessment and multi-stow reasoning, indicating that our model can provide useful foresight signals for warehouse planning.
Stow: Robotic Packing of Items into Fabric Pods
May 07, 2025



This paper presents a compliant manipulation system capable of placing items onto densely packed shelves. The wide diversity of items and strict business requirements for high producing rates and low defect generation have prohibited warehouse robotics from performing this task. Our innovations in hardware, perception, decision-making, motion planning, and control have enabled this system to perform over 500,000 stows in a large e-commerce fulfillment center. The system achieves human levels of packing density and speed while prioritizing work on overhead shelves to enhance the safety of humans working alongside the robots.
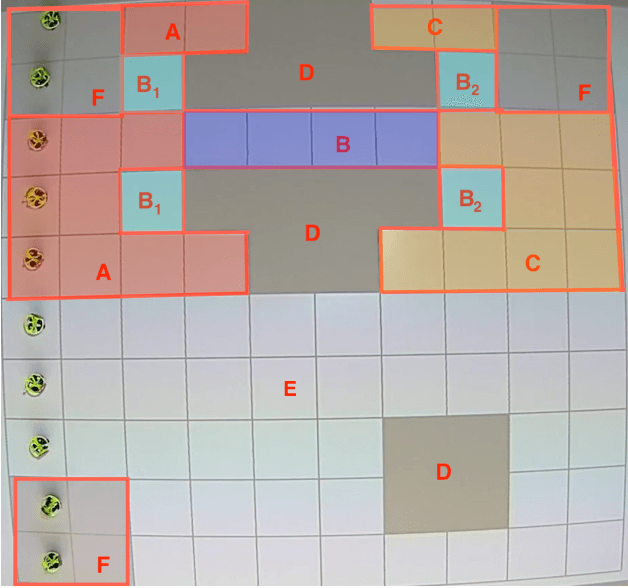
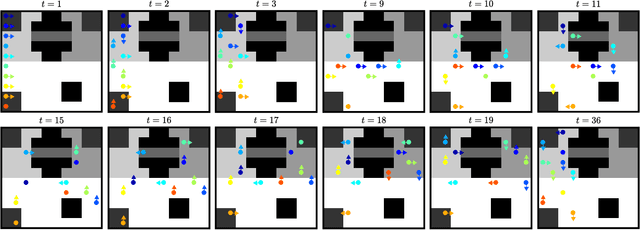
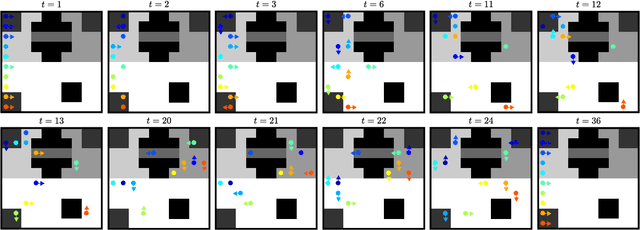
Intermittent Connectivity for Exploration in Communication-Constrained Multi-Agent Systems
Nov 19, 2019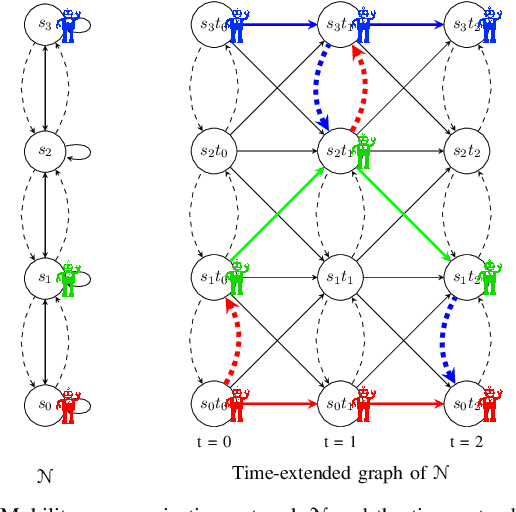
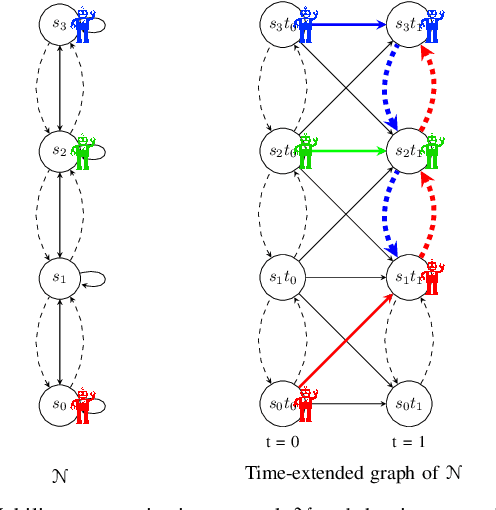
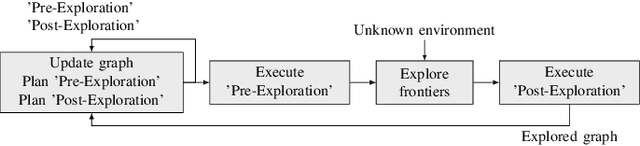
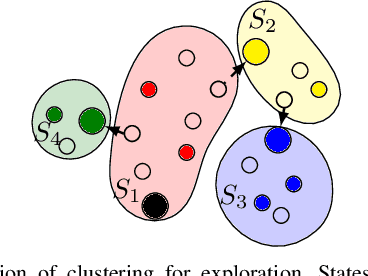
Motivated by exploration of communication-constrained underground environments using robot teams, we study the problem of planning for intermittent connectivity in multi-agent systems. We propose a novel concept of information-consistency to handle situations where the plan is not initially known by all agents, and suggest an integer linear program for synthesizing information-consistent plans that also achieve auxiliary goals. Furthermore, inspired by network flow problems we propose a novel way to pose connectivity constraints that scales much better than previous methods. In the second part of the paper we apply these results in an exploration setting, and propose a clustering method that separates a large exploration problem into smaller problems that can be solved independently. We demonstrate how the resulting exploration algorithm is able to coordinate a team of ten agents to explore a large environment.
Multirobot Coordination with Counting Temporal Logics
Oct 31, 2018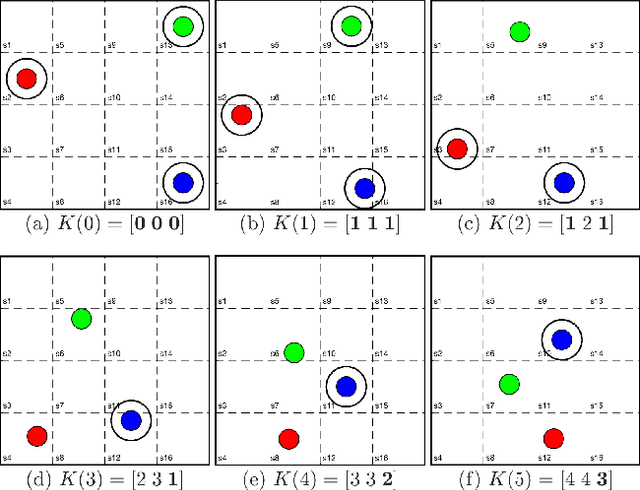
In many multirobot applications, planning trajectories in a way to guarantee that the collective behavior of the robots satisfies a certain high-level specification is crucial. Motivated by this problem, we introduce counting temporal logics---formal languages that enable concise expression of multirobot task specifications over possibly infinite horizons. We first introduce a general logic called counting linear temporal logic plus (cLTL+), and propose an optimization-based method that generates individual trajectories such that satisfaction of a given cLTL+ formula is guaranteed when these trajectories are synchronously executed. We then introduce a fragment of cLTL+, called counting linear temporal logic (cLTL), and show that a solution to planning problem with cLTL constraints can be obtained more efficiently if all robots have identical dynamics. In the second part of the paper, we relax the synchrony assumption and discuss how to generate trajectories that can be asynchronously executed, while preserving the satisfaction of the desired cLTL+ specification. In particular, we show that when the asynchrony between robots is bounded, the method presented in this paper can be modified to generate robust trajectories. We demonstrate these ideas with an experiment and provide numerical results that showcase the scalability of the method.