 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Foresight for Robotic Stow: A Diffusion-Based World Model from Sparse Snapshots
Feb 12, 2026Automated warehouses execute millions of stow operations, where robots place objects into storage bins. For these systems it is valuable to anticipate how a bin will look from the current observations and the planned stow behavior before real execution. We propose FOREST, a stow-intent-conditioned world model that represents bin states as item-aligned instance masks and uses a latent diffusion transformer to predict the post-stow configuration from the observed context. Our evaluation shows that FOREST substantially improves the geometric agreement between predicted and true post-stow layouts compared with heuristic baselines. We further evaluate the predicted post-stow layouts in two downstream tasks, in which replacing the real post-stow masks with FOREST predictions causes only modest performance loss in load-quality assessment and multi-stow reasoning, indicating that our model can provide useful foresight signals for warehouse planning.
Stow: Robotic Packing of Items into Fabric Pods
May 07, 2025



This paper presents a compliant manipulation system capable of placing items onto densely packed shelves. The wide diversity of items and strict business requirements for high producing rates and low defect generation have prohibited warehouse robotics from performing this task. Our innovations in hardware, perception, decision-making, motion planning, and control have enabled this system to perform over 500,000 stows in a large e-commerce fulfillment center. The system achieves human levels of packing density and speed while prioritizing work on overhead shelves to enhance the safety of humans working alongside the robots.
Human-Supervised Semi-Autonomous Mobile Manipulators for Safely and Efficiently Executing Machine Tending Tasks
Oct 16, 2020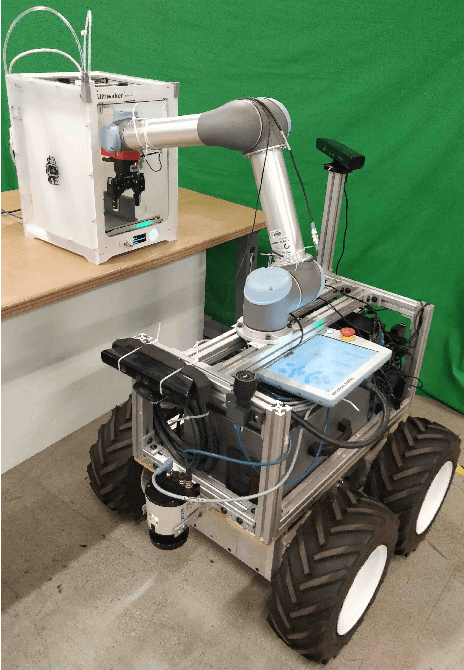
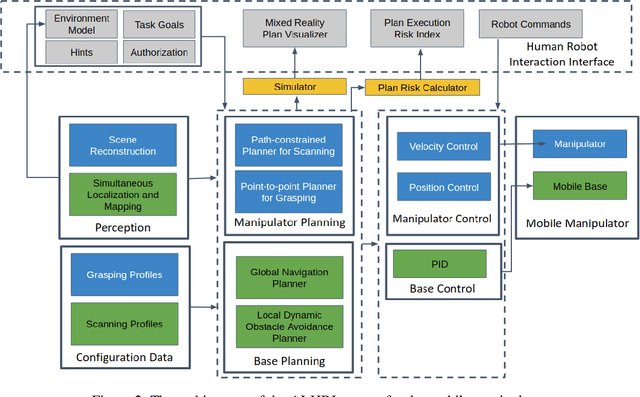
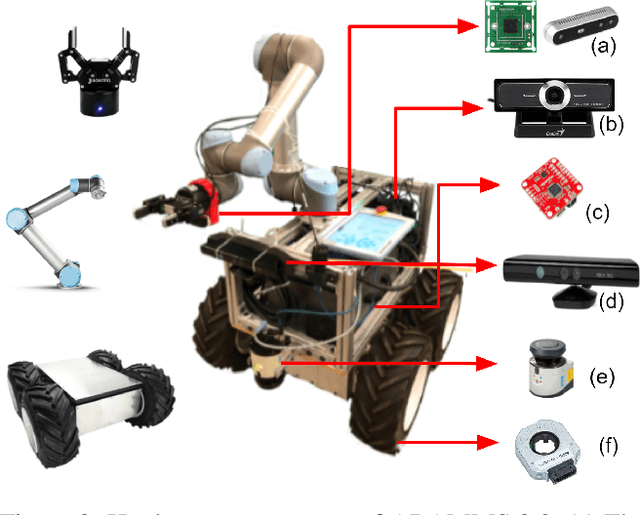
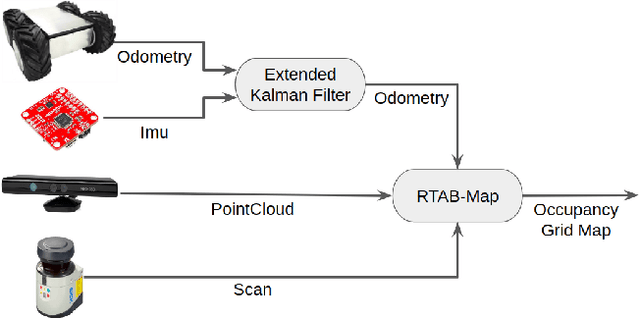
Mobile manipulators can be used for machine tending and material handling tasks in small volume manufacturing applications. These applications usually have semi-structured work environment. The use of a fully autonomous mobile manipulator for such applications can be risky, as an inaccurate model of the workspace may result in damage to expensive equipment. On the other hand, the use of a fully teleoperated mobile manipulator may require a significant amount of operator time. In this paper, a semi-autonomous mobile manipulator is developed for safely and efficiently carrying out machine tending tasks under human supervision. The robot is capable of generating motion plans from the high-level task description and presenting simulation results to the human for approval. The human operator can authorize the robot to execute the automatically generated plan or provide additional input to the planner to refine the plan. If the level of uncertainty in some parts of the workspace model is high, then the human can decide to perform teleoperation to safely execute the task. Our preliminary user trials show that non-expert operators can quickly learn to use the system and perform machine tending tasks.