 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffHPE: Robust, Coherent 3D Human Pose Lifting with Diffusion
Sep 04, 2023



We present an innovative approach to 3D Human Pose Estimation (3D-HPE) by integrating cutting-edge diffusion models, which have revolutionized diverse fields, but are relatively unexplored in 3D-HPE. We show that diffusion models enhance the accuracy, robustness, and coherence of human pose estimations. We introduce DiffHPE, a novel strategy for harnessing diffusion models in 3D-HPE, and demonstrate its ability to refine standard supervised 3D-HPE. We also show how diffusion models lead to more robust estimations in the face of occlusions, and improve the time-coherence and the sagittal symmetry of predictions. Using the Human\,3.6M dataset, we illustrate the effectiveness of our approach and its superiority over existing models, even under adverse situations where the occlusion patterns in training do not match those in inference. Our findings indicate that while standalone diffusion models provide commendable performance, their accuracy is even better in combination with supervised models, opening exciting new avenues for 3D-HPE research.
MOCA: Self-supervised Representation Learning by Predicting Masked Online Codebook Assignments
Jul 18, 2023Self-supervised learning can be used for mitigating the greedy needs of Vision Transformer networks for very large fully-annotated datasets. Different classes of self-supervised learning offer representations with either good contextual reasoning properties, e.g., using masked image modeling strategies, or invariance to image perturbations, e.g., with contrastive methods. In this work, we propose a single-stage and standalone method, MOCA, which unifies both desired properties using novel mask-and-predict objectives defined with high-level features (instead of pixel-level details). Moreover, we show how to effectively employ both learning paradigms in a synergistic and computation-efficient way. Doing so, we achieve new state-of-the-art results on low-shot settings and strong experimental results in various evaluation protocols with a training that is at least 3 times faster than prior methods.
Challenges of Using Real-World Sensory Inputs for Motion Forecasting in Autonomous Driving
Jun 15, 2023Motion forecasting plays a critical role in enabling robots to anticipate future trajectories of surrounding agents and plan accordingly. However, existing forecasting methods often rely on curated datasets that are not faithful to what real-world perception pipelines can provide. In reality, upstream modules that are responsible for detecting and tracking agents, and those that gather road information to build the map, can introduce various errors, including misdetections, tracking errors, and difficulties in being accurate for distant agents and road elements. This paper aims to uncover the challenges of bringing motion forecasting models to this more realistic setting where inputs are provided by perception modules. In particular, we quantify the impacts of the domain gap through extensive evaluation. Furthermore, we design synthetic perturbations to better characterize their consequences, thus providing insights into areas that require improvement in upstream perception modules and guidance toward the development of more robust forecasting methods.
Diverse Probabilistic Trajectory Forecasting with Admissibility Constraints
Feb 07, 2023Predicting multiple trajectories for road users is important for automated driving systems: ego-vehicle motion planning indeed requires a clear view of the possible motions of the surrounding agents. However, the generative models used for multiple-trajectory forecasting suffer from a lack of diversity in their proposals. To avoid this form of collapse, we propose a novel method for structured prediction of diverse trajectories. To this end, we complement an underlying pretrained generative model with a diversity component, based on a determinantal point process (DPP). We balance and structure this diversity with the inclusion of knowledge-based quality constraints, independent from the underlying generative model. We combine these two novel components with a gating operation, ensuring that the predictions are both diverse and within the drivable area. We demonstrate on the nuScenes driving dataset the relevance of our compound approach, which yields significant improvements in the diversity and the quality of the generated trajectories.
Unsupervised Object Localization: Observing the Background to Discover Objects
Dec 15, 2022Recent advances in self-supervised visual representation learning have paved the way for unsupervised methods tackling tasks such as object discovery and instance segmentation. However, discovering objects in an image with no supervision is a very hard task; what are the desired objects, when to separate them into parts, how many are there, and of what classes? The answers to these questions depend on the tasks and datasets of evaluation. In this work, we take a different approach and propose to look for the background instead. This way, the salient objects emerge as a by-product without any strong assumption on what an object should be. We propose FOUND, a simple model made of a single $conv1\times1$ initialized with coarse background masks extracted from self-supervised patch-based representations. After fast training and refining these seed masks, the model reaches state-of-the-art results on unsupervised saliency detection and object discovery benchmarks. Moreover, we show that our approach yields good results in the unsupervised semantic segmentation retrieval task. The code to reproduce our results is available at https://github.com/valeoai/FOUND.
PØDA: Prompt-driven Zero-shot Domain Adaptation
Dec 06, 2022



Domain adaptation has been vastly investigated in computer vision but still requires access to target images at train time, which might be intractable in some conditions, especially for long-tail samples. In this paper, we propose the task of `Prompt-driven Zero-shot Domain Adaptation', where we adapt a model trained on a source domain using only a general textual description of the target domain, i.e., a prompt. First, we leverage a pretrained contrastive vision-language model (CLIP) to optimize affine transformations of source features, bringing them closer to target text embeddings, while preserving their content and semantics. Second, we show that augmented features can be used to perform zero-shot domain adaptation for semantic segmentation. Experiments demonstrate that our method significantly outperforms CLIP-based style transfer baselines on several datasets for the downstream task at hand. Our prompt-driven approach even outperforms one-shot unsupervised domain adaptation on some datasets, and gives comparable results on others. The code is available at https://github.com/astra-vision/PODA.
OCTET: Object-aware Counterfactual Explanations
Nov 22, 2022



Nowadays, deep vision models are being widely deployed in safety-critical applications, e.g., autonomous driving, and explainability of such models is becoming a pressing concern. Among explanation methods, counterfactual explanations aim to find minimal and interpretable changes to the input image that would also change the output of the model to be explained. Such explanations point end-users at the main factors that impact the decision of the model. However, previous methods struggle to explain decision models trained on images with many objects, e.g., urban scenes, which are more difficult to work with but also arguably more critical to explain. In this work, we propose to tackle this issue with an object-centric framework for counterfactual explanation generation. Our method, inspired by recent generative modeling works, encodes the query image into a latent space that is structured in a way to ease object-level manipulations. Doing so, it provides the end-user with control over which search directions (e.g., spatial displacement of objects, style modification, etc.) are to be explored during the counterfactual generation. We conduct a set of experiments on counterfactual explanation benchmarks for driving scenes, and we show that our method can be adapted beyond classification, e.g., to explain semantic segmentation models. To complete our analysis, we design and run a user study that measures the usefulness of counterfactual explanations in understanding a decision model. Code is available at https://github.com/valeoai/OCTET.
Take One Gram of Neural Features, Get Enhanced Group Robustness
Aug 26, 2022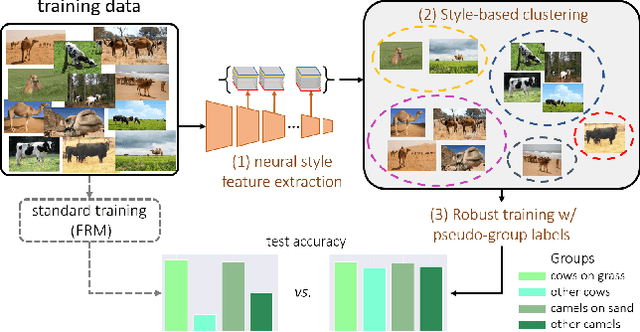
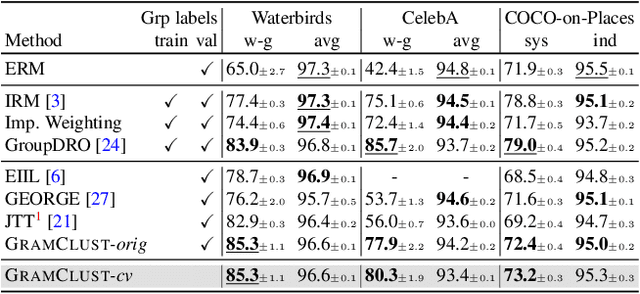
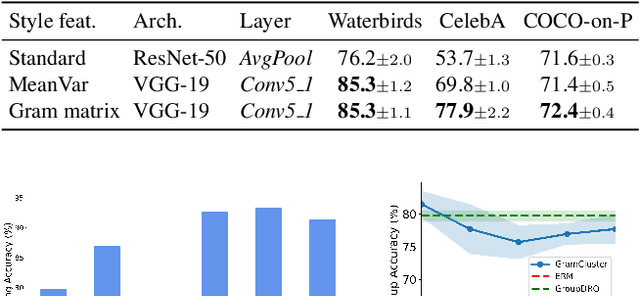
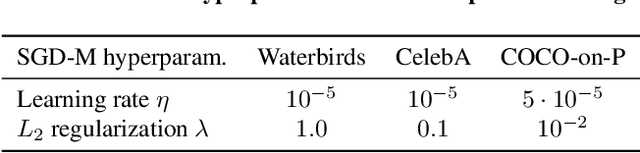
Predictive performance of machine learning models trained with empirical risk minimization (ERM) can degrade considerably under distribution shifts. The presence of spurious correlations in training datasets leads ERM-trained models to display high loss when evaluated on minority groups not presenting such correlations. Extensive attempts have been made to develop methods improving worst-group robustness. However, they require group information for each training input or at least, a validation set with group labels to tune their hyperparameters, which may be expensive to get or unknown a priori. In this paper, we address the challenge of improving group robustness without group annotation during training or validation. To this end, we propose to partition the training dataset into groups based on Gram matrices of features extracted by an ``identification'' model and to apply robust optimization based on these pseudo-groups. In the realistic context where no group labels are available, our experiments show that our approach not only improves group robustness over ERM but also outperforms all recent baselines
Self-supervised learning with rotation-invariant kernels
Jul 28, 2022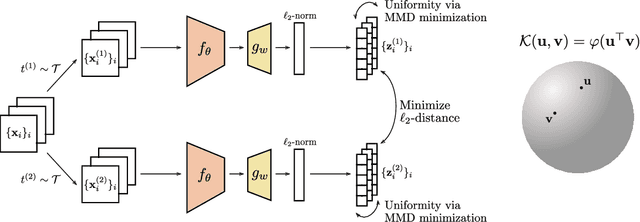
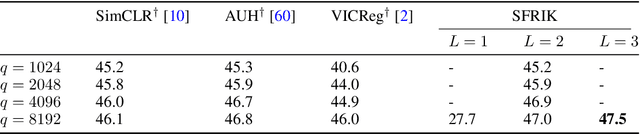
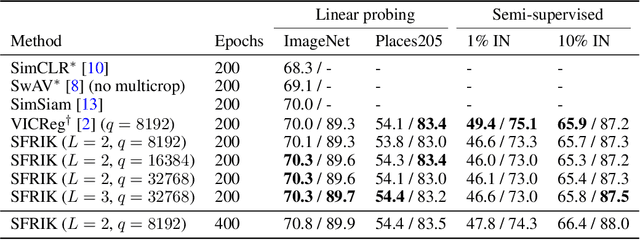

A major paradigm for learning image representations in a self-supervised manner is to learn a model that is invariant to some predefined image transformations (cropping, blurring, color jittering, etc.), while regularizing the embedding distribution to avoid learning a degenerate solution. Our first contribution is to propose a general kernel framework to design a generic regularization loss that promotes the embedding distribution to be close to the uniform distribution on the hypersphere, with respect to the maximum mean discrepancy pseudometric. Our framework uses rotation-invariant kernels defined on the hypersphere, also known as dot-product kernels. Our second contribution is to show that this flexible kernel approach encompasses several existing self-supervised learning methods, including uniformity-based and information-maximization methods. Finally, by exploring empirically several kernel choices, our experiments demonstrate that using a truncated rotation-invariant kernel provides competitive results compared to state-of-the-art methods, and we show practical situations where our method benefits from the kernel trick to reduce computational complexity.
Active Learning Strategies for Weakly-supervised Object Detection
Jul 25, 2022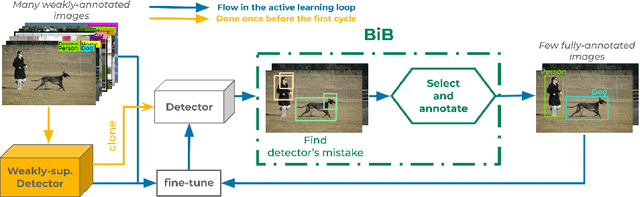
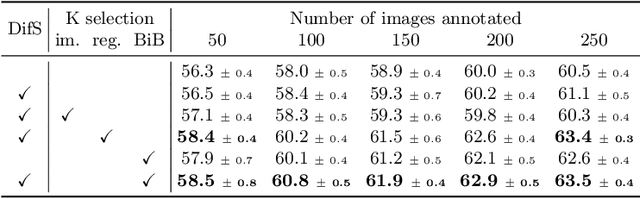

Object detectors trained with weak annotations are affordable alternatives to fully-supervised counterparts. However, there is still a significant performance gap between them. We propose to narrow this gap by fine-tuning a base pre-trained weakly-supervised detector with a few fully-annotated samples automatically selected from the training set using ``box-in-box'' (BiB), a novel active learning strategy designed specifically to address the well-documented failure modes of weakly-supervised detectors. Experiments on the VOC07 and COCO benchmarks show that BiB outperforms other active learning techniques and significantly improves the base weakly-supervised detector's performance with only a few fully-annotated images per class. BiB reaches 97% of the performance of fully-supervised Fast RCNN with only 10% of fully-annotated images on VOC07. On COCO, using on average 10 fully-annotated images per class, or equivalently 1% of the training set, BiB also reduces the performance gap (in AP) between the weakly-supervised detector and the fully-supervised Fast RCNN by over 70%, showing a good trade-off between performance and data efficiency. Our code is publicly available at https://github.com/huyvvo/BiB.