 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Dynamic Object Detection in Cluttered Indoor Scenes via Learned Spatiotemporal Cues
Mar 16, 2026Reliable dynamic object detection in cluttered environments remains a critical challenge for autonomous navigation. Purely geometric LiDAR pipelines that rely on clustering and heuristic filtering can miss dynamic obstacles when they move in close proximity to static structure or are only partially observed. Vision-augmented approaches can provide additional semantic cues, but are often limited by closed-set detectors and camera field-of-view constraints, reducing robustness to novel obstacles and out-of-frustum events. In this work, we present a LiDAR-only framework that fuses temporal occupancy-grid-based motion segmentation with a learned bird's-eye-view (BEV) dynamic prior. A fusion module prioritizes 3D detections when available, while using the learned dynamic grid to recover detections that would otherwise be lost due to proximity-induced false negatives. Experiments with motion-capture ground truth show our method achieves 28.67% higher recall and 18.50% higher F1 score than the state-of-the-art in substantially cluttered environments while maintaining comparable precision and position error.
Robust MADER: Decentralized Multiagent Trajectory Planner Robust to Communication Delay in Dynamic Environments
Mar 10, 2023



Communication delays can be catastrophic for multiagent systems. However, most existing state-of-the-art multiagent trajectory planners assume perfect communication and therefore lack a strategy to rectify this issue in real-world environments. To address this challenge, we propose Robust MADER (RMADER), a decentralized, asynchronous multiagent trajectory planner robust to communication delay. By always keeping a guaranteed collision-free trajectory and performing a delay check step, RMADER is able to guarantee safety even under communication delay. We perform an in-depth analysis of trajectory deconfliction among agents, extensive benchmark studies, and hardware flight experiments with multiple dynamic obstacles. We show that RMADER outperforms existing approaches by achieving a 100% success rate of collision-free trajectory generation, whereas the next best asynchronous decentralized method only achieves 83% success.
Robust MADER: Decentralized and Asynchronous Multiagent Trajectory Planner Robust to Communication Delay
Oct 06, 2022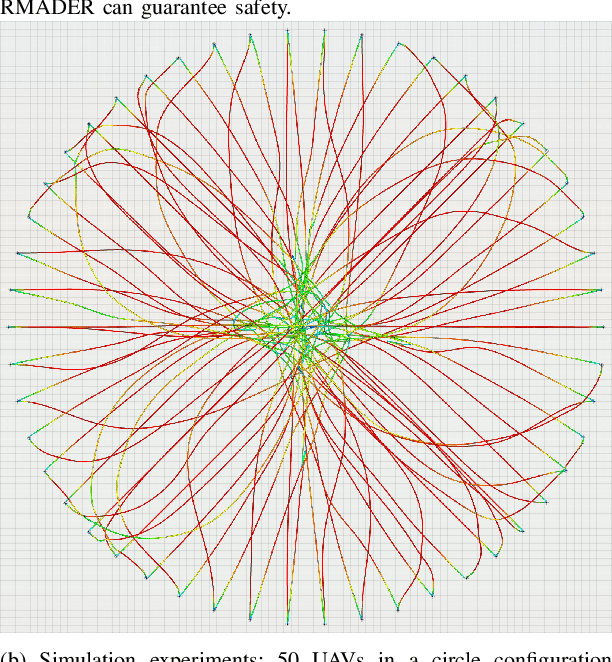
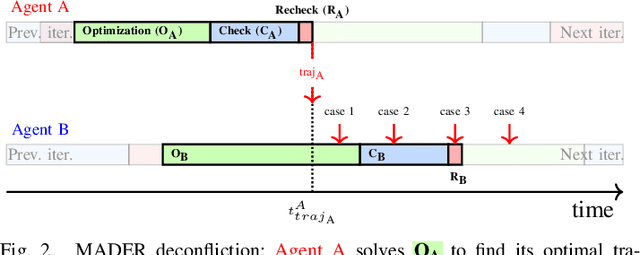
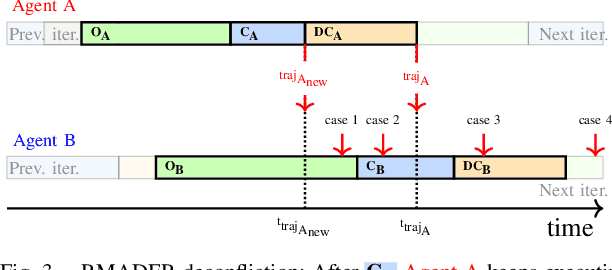
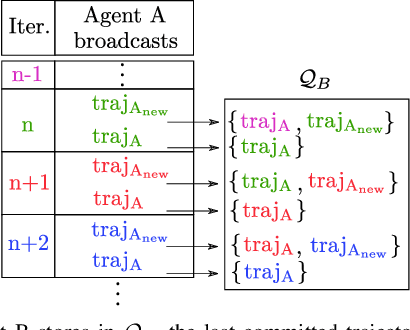
Although communication delays can disrupt multiagent systems, most of the existing multiagent trajectory planners lack a strategy to address this issue. State-of-the-art approaches typically assume perfect communication environments, which is hardly realistic in real-world experiments. This paper presents Robust MADER (RMADER), a decentralized and asynchronous multiagent trajectory planner that can handle communication delays among agents. By broadcasting both the newly optimized trajectory and the committed trajectory, and by performing a delay check step, RMADER is able to guarantee safety even under communication delay. RMADER was validated through extensive simulation and hardware flight experiments and achieved a 100% success rate of collision-free trajectory generation, outperforming state-of-the-art approaches.