 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMT-ORL: Multi-Task Occlusion Relationship Learning
Aug 18, 2021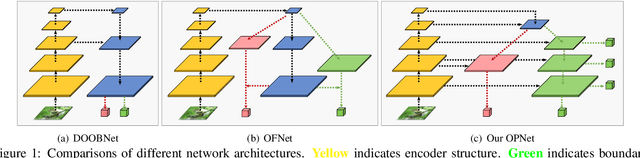
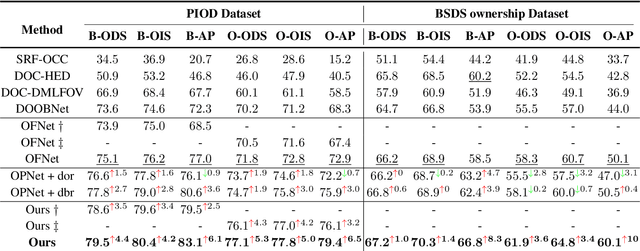
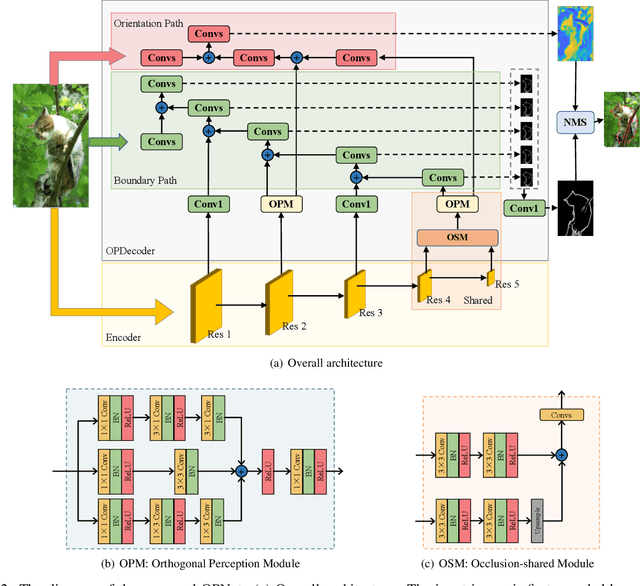
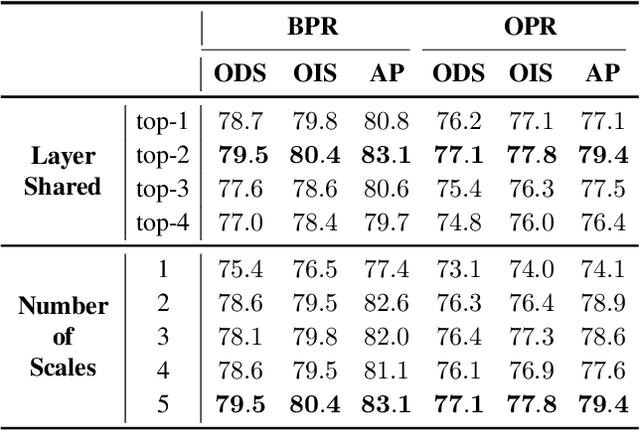
Retrieving occlusion relation among objects in a single image is challenging due to sparsity of boundaries in image. We observe two key issues in existing works: firstly, lack of an architecture which can exploit the limited amount of coupling in the decoder stage between the two subtasks, namely occlusion boundary extraction and occlusion orientation prediction, and secondly, improper representation of occlusion orientation. In this paper, we propose a novel architecture called Occlusion-shared and Path-separated Network (OPNet), which solves the first issue by exploiting rich occlusion cues in shared high-level features and structured spatial information in task-specific low-level features. We then design a simple but effective orthogonal occlusion representation (OOR) to tackle the second issue. Our method surpasses the state-of-the-art methods by 6.1%/8.3% Boundary-AP and 6.5%/10% Orientation-AP on standard PIOD/BSDS ownership datasets. Code is available at https://github.com/fengpanhe/MT-ORL.
DDNet: Dual-path Decoder Network for Occlusion Relationship Reasoning
Nov 26, 2019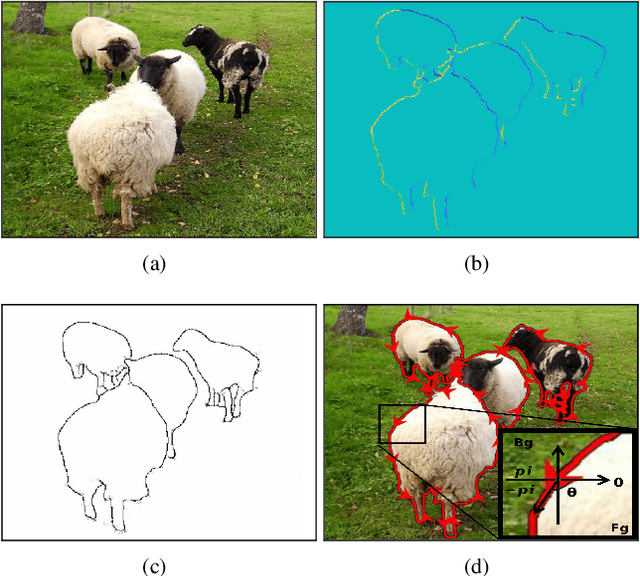
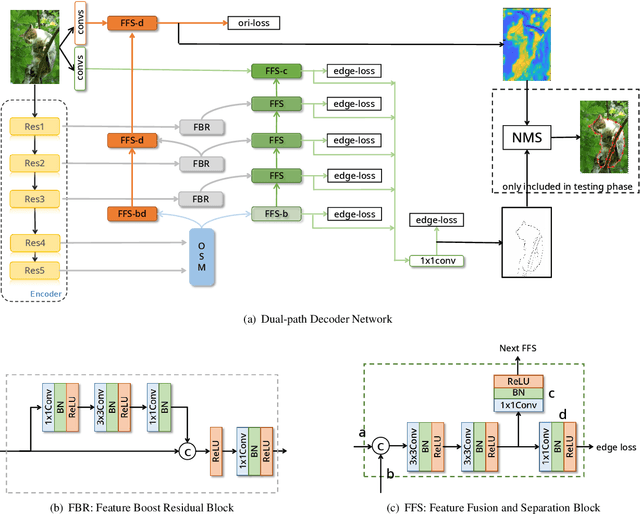
Occlusion relationship reasoning based on convolution neural networks consists of two subtasks: occlusion boundary extraction and occlusion orientation inference. Due to the essential differences between the two subtasks in the feature expression at the higher and lower stages, it is challenging to carry on them simultaneously in one network. To address this issue, we propose a novel Dual-path Decoder Network, which uniformly extracts occlusion information at higher stages and separates into two paths to recover boundary and occlusion orientation respectively in lower stages. Besides, considering the restriction of occlusion orientation presentation to occlusion orientation learning, we design a new orthogonal representation for occlusion orientation and proposed the Orthogonal Orientation Regression loss which can get rid of the unfitness between occlusion representation and learning and further prompt the occlusion orientation learning. Finally, we apply a multi-scale loss together with our proposed orientation regression loss to guide the boundary and orientation path learning respectively. Experiments demonstrate that our proposed method achieves state-of-the-art results on PIOD and BSDS ownership datasets.