 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunity Concealment from Unsupervised Graph Learning-Based Clustering
Feb 12, 2026Graph neural networks (GNNs) are designed to use attributed graphs to learn representations. Such representations are beneficial in the unsupervised learning of clusters and community detection. Nonetheless, such inference may reveal sensitive groups, clustered systems, or collective behaviors, raising concerns regarding group-level privacy. Community attribution in social and critical infrastructure networks, for example, can expose coordinated asset groups, operational hierarchies, and system dependencies that could be used for profiling or intelligence gathering. We study a defensive setting in which a data publisher (defender) seeks to conceal a community of interest while making limited, utility-aware changes in the network. Our analysis indicates that community concealment is strongly influenced by two quantifiable factors: connectivity at the community boundary and feature similarity between the protected community and adjacent communities. Informed by these findings, we present a perturbation strategy that rewires a set of selected edges and modifies node features to reduce the distinctiveness leveraged by GNN message passing. The proposed method outperforms DICE in our experiments on synthetic benchmarks and real network graphs under identical perturbation budgets. Overall, it achieves median relative concealment improvements of approximately 20-45% across the evaluated settings. These findings demonstrate a mitigation strategy against GNN-based community learning and highlight group-level privacy risks intrinsic to graph learning.
Evaluating False Alarm and Missing Attacks in CAN IDS
Feb 02, 2026Modern vehicles rely on electronic control units (ECUs) interconnected through the Controller Area Network (CAN), making in-vehicle communication a critical security concern. Machine learning (ML)-based intrusion detection systems (IDS) are increasingly deployed to protect CAN traffic, yet their robustness against adversarial manipulation remains largely unexplored. We present a systematic adversarial evaluation of CAN IDS using the ROAD dataset, comparing four shallow learning models with a deep neural network-based detector. Using protocol-compliant, payload-level perturbations generated via FGSM, BIM and PGD, we evaluate adversarial effects on both benign and malicious CAN frames. While all models achieve strong baseline performance under benign conditions, adversarial perturbations reveal substantial vulnerabilities. Although shallow and deep models are robust to false-alarm induction, with the deep neural network (DNN) performing best on benign traffic, all architectures suffer significant increases in missed attacks. Notably, under gradient-based attacks, the shallow model extra trees (ET) demonstrates improved robustness to missed-attack induction compared to the other models. Our results demonstrate that adversarial manipulation can simultaneously trigger false alarms and evade detection, underscoring the need for adversarial robustness evaluation in safety-critical automotive IDS.
Temporal cross-validation impacts multivariate time series subsequence anomaly detection evaluation
Jun 13, 2025Evaluating anomaly detection in multivariate time series (MTS) requires careful consideration of temporal dependencies, particularly when detecting subsequence anomalies common in fault detection scenarios. While time series cross-validation (TSCV) techniques aim to preserve temporal ordering during model evaluation, their impact on classifier performance remains underexplored. This study systematically investigates the effect of TSCV strategy on the precision-recall characteristics of classifiers trained to detect fault-like anomalies in MTS datasets. We compare walk-forward (WF) and sliding window (SW) methods across a range of validation partition configurations and classifier types, including shallow learners and deep learning (DL) classifiers. Results show that SW consistently yields higher median AUC-PR scores and reduced fold-to-fold performance variance, particularly for deep architectures sensitive to localized temporal continuity. Furthermore, we find that classifier generalization is sensitive to the number and structure of temporal partitions, with overlapping windows preserving fault signatures more effectively at lower fold counts. A classifier-level stratified analysis reveals that certain algorithms, such as random forests (RF), maintain stable performance across validation schemes, whereas others exhibit marked sensitivity. This study demonstrates that TSCV design in benchmarking anomaly detection models on streaming time series and provide guidance for selecting evaluation strategies in temporally structured learning environments.
Electrical Load Forecasting over Multihop Smart Metering Networks with Federated Learning
Feb 24, 2025Electric load forecasting is essential for power management and stability in smart grids. This is mainly achieved via advanced metering infrastructure, where smart meters (SMs) record household energy data. Traditional machine learning (ML) methods are often employed for load forecasting but require data sharing which raises data privacy concerns. Federated learning (FL) can address this issue by running distributed ML models at local SMs without data exchange. However, current FL-based approaches struggle to achieve efficient load forecasting due to imbalanced data distribution across heterogeneous SMs. This paper presents a novel personalized federated learning (PFL) method for high-quality load forecasting in metering networks. A meta-learning-based strategy is developed to address data heterogeneity at local SMs in the collaborative training of local load forecasting models. Moreover, to minimize the load forecasting delays in our PFL model, we study a new latency optimization problem based on optimal resource allocation at SMs. A theoretical convergence analysis is also conducted to provide insights into FL design for federated load forecasting. Extensive simulations from real-world datasets show that our method outperforms existing approaches in terms of better load forecasting and reduced operational latency costs.
Detecting Masquerade Attacks in Controller Area Networks Using Graph Machine Learning
Aug 10, 2024



Modern vehicles rely on a myriad of electronic control units (ECUs) interconnected via controller area networks (CANs) for critical operations. Despite their ubiquitous use and reliability, CANs are susceptible to sophisticated cyberattacks, particularly masquerade attacks, which inject false data that mimic legitimate messages at the expected frequency. These attacks pose severe risks such as unintended acceleration, brake deactivation, and rogue steering. Traditional intrusion detection systems (IDS) often struggle to detect these subtle intrusions due to their seamless integration into normal traffic. This paper introduces a novel framework for detecting masquerade attacks in the CAN bus using graph machine learning (ML). We hypothesize that the integration of shallow graph embeddings with time series features derived from CAN frames enhances the detection of masquerade attacks. We show that by representing CAN bus frames as message sequence graphs (MSGs) and enriching each node with contextual statistical attributes from time series, we can enhance detection capabilities across various attack patterns compared to using only graph-based features. Our method ensures a comprehensive and dynamic analysis of CAN frame interactions, improving robustness and efficiency. Extensive experiments on the ROAD dataset validate the effectiveness of our approach, demonstrating statistically significant improvements in the detection rates of masquerade attacks compared to a baseline that uses only graph-based features, as confirmed by Mann-Whitney U and Kolmogorov-Smirnov tests (p < 0.05).
Benchmarking Unsupervised Online IDS for Masquerade Attacks in CAN
Jun 19, 2024



Vehicular controller area networks (CANs) are susceptible to masquerade attacks by malicious adversaries. In masquerade attacks, adversaries silence a targeted ID and then send malicious frames with forged content at the expected timing of benign frames. As masquerade attacks could seriously harm vehicle functionality and are the stealthiest attacks to detect in CAN, recent work has devoted attention to compare frameworks for detecting masquerade attacks in CAN. However, most existing works report offline evaluations using CAN logs already collected using simulations that do not comply with domain's real-time constraints. Here we contribute to advance the state of the art by introducing a benchmark study of four different non-deep learning (DL)-based unsupervised online intrusion detection systems (IDS) for masquerade attacks in CAN. Our approach differs from existing benchmarks in that we analyze the effect of controlling streaming data conditions in a sliding window setting. In doing so, we use realistic masquerade attacks being replayed from the ROAD dataset. We show that although benchmarked IDS are not effective at detecting every attack type, the method that relies on detecting changes at the hierarchical structure of clusters of time series produces the best results at the expense of higher computational overhead. We discuss limitations, open challenges, and how the benchmarked methods can be used for practical unsupervised online CAN IDS for masquerade attacks.
Robustness of graph embedding methods for community detection
May 01, 2024



This study investigates the robustness of graph embedding methods for community detection in the face of network perturbations, specifically edge deletions. Graph embedding techniques, which represent nodes as low-dimensional vectors, are widely used for various graph machine learning tasks due to their ability to capture structural properties of networks effectively. However, the impact of perturbations on the performance of these methods remains relatively understudied. The research considers state-of-the-art graph embedding methods from two families: matrix factorization (e.g., LE, LLE, HOPE, M-NMF) and random walk-based (e.g., DeepWalk, LINE, node2vec). Through experiments conducted on both synthetic and real-world networks, the study reveals varying degrees of robustness within each family of graph embedding methods. The robustness is found to be influenced by factors such as network size, initial community partition strength, and the type of perturbation. Notably, node2vec and LLE consistently demonstrate higher robustness for community detection across different scenarios, including networks with degree and community size heterogeneity. These findings highlight the importance of selecting an appropriate graph embedding method based on the specific characteristics of the network and the task at hand, particularly in scenarios where robustness to perturbations is crucial.
CANShield: Signal-based Intrusion Detection for Controller Area Networks
May 03, 2022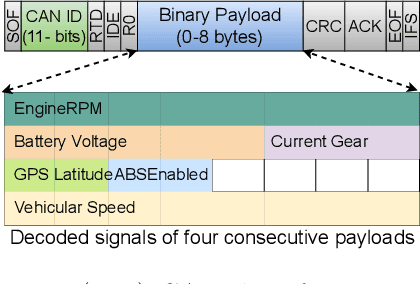
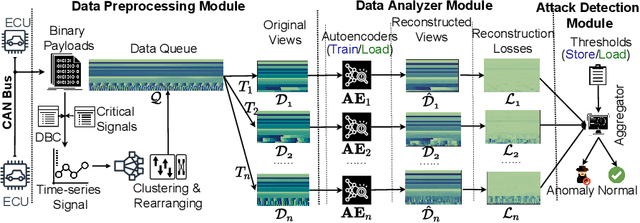
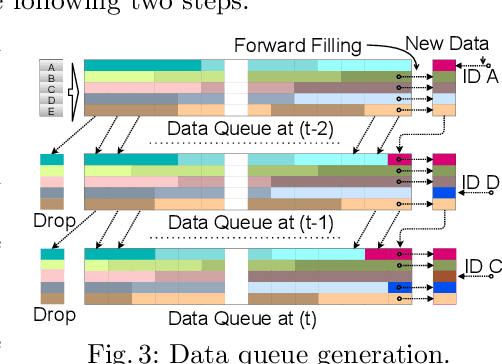
Modern vehicles rely on a fleet of electronic control units (ECUs) connected through controller area network (CAN) buses for critical vehicular control. However, with the expansion of advanced connectivity features in automobiles and the elevated risks of internal system exposure, the CAN bus is increasingly prone to intrusions and injection attacks. The ordinary injection attacks disrupt the typical timing properties of the CAN data stream, and the rule-based intrusion detection systems (IDS) can easily detect them. However, advanced attackers can inject false data to the time series sensory data (signal), while looking innocuous by the pattern/frequency of the CAN messages. Such attacks can bypass the rule-based IDS or any anomaly-based IDS built on binary payload data. To make the vehicles robust against such intelligent attacks, we propose CANShield, a signal-based intrusion detection framework for the CAN bus. CANShield consists of three modules: a data preprocessing module that handles the high-dimensional CAN data stream at the signal level and makes them suitable for a deep learning model; a data analyzer module consisting of multiple deep autoencoder (AE) networks, each analyzing the time-series data from a different temporal perspective; and finally an attack detection module that uses an ensemble method to make the final decision. Evaluation results on two high-fidelity signal-based CAN attack datasets show the high accuracy and responsiveness of CANShield in detecting wide-range of advanced intrusion attacks.
Detecting CAN Masquerade Attacks with Signal Clustering Similarity
Jan 07, 2022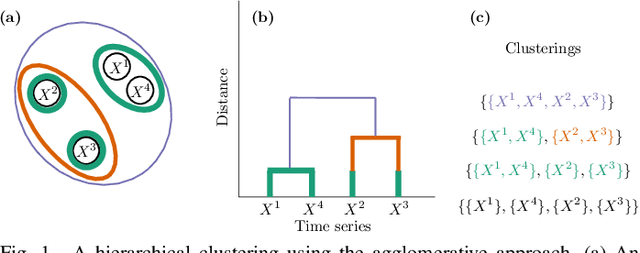
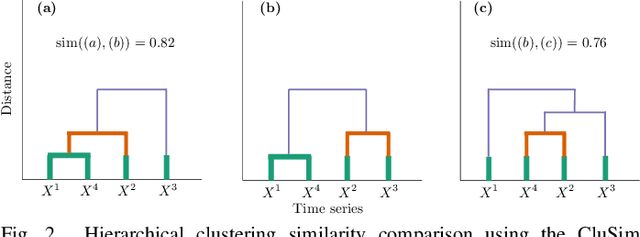
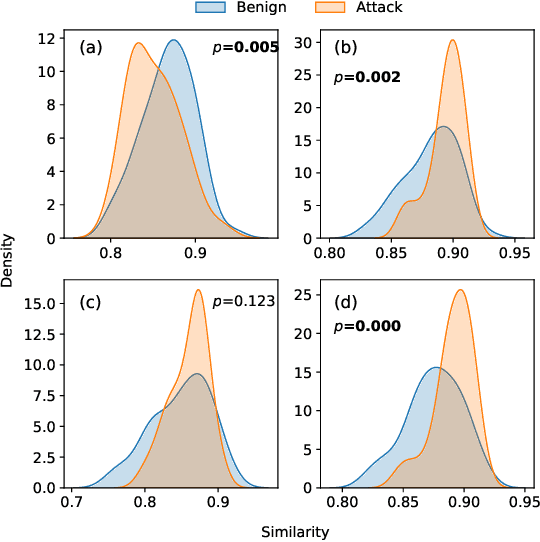
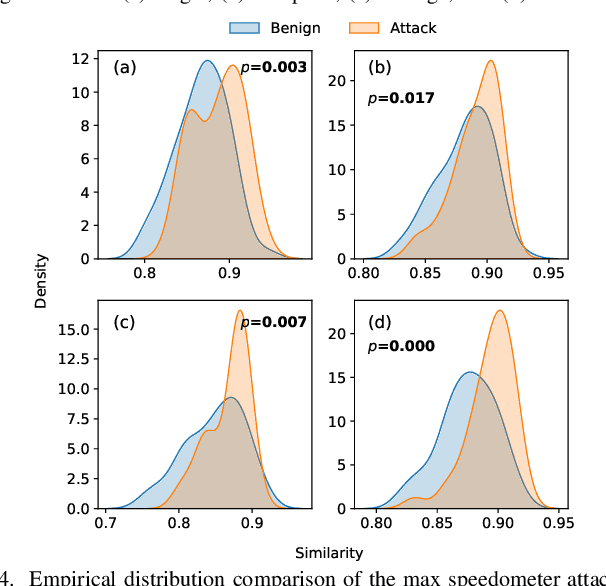
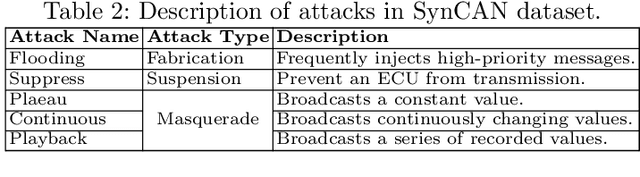
Vehicular Controller Area Networks (CANs) are susceptible to cyber attacks of different levels of sophistication. Fabrication attacks are the easiest to administer -- an adversary simply sends (extra) frames on a CAN -- but also the easiest to detect because they disrupt frame frequency. To overcome time-based detection methods, adversaries must administer masquerade attacks by sending frames in lieu of (and therefore at the expected time of) benign frames but with malicious payloads. Research efforts have proven that CAN attacks, and masquerade attacks in particular, can affect vehicle functionality. Examples include causing unintended acceleration, deactivation of vehicle's brakes, as well as steering the vehicle. We hypothesize that masquerade attacks modify the nuanced correlations of CAN signal time series and how they cluster together. Therefore, changes in cluster assignments should indicate anomalous behavior. We confirm this hypothesis by leveraging our previously developed capability for reverse engineering CAN signals (i.e., CAN-D [Controller Area Network Decoder]) and focus on advancing the state of the art for detecting masquerade attacks by analyzing time series extracted from raw CAN frames. Specifically, we demonstrate that masquerade attacks can be detected by computing time series clustering similarity using hierarchical clustering on the vehicle's CAN signals (time series) and comparing the clustering similarity across CAN captures with and without attacks. We test our approach in a previously collected CAN dataset with masquerade attacks (i.e., the ROAD dataset) and develop a forensic tool as a proof of concept to demonstrate the potential of the proposed approach for detecting CAN masquerade attacks.
Graph-Based Machine Learning Improves Just-in-Time Defect Prediction
Oct 11, 2021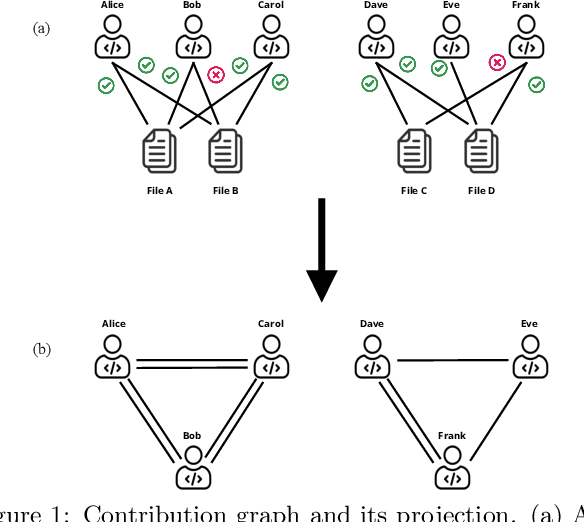
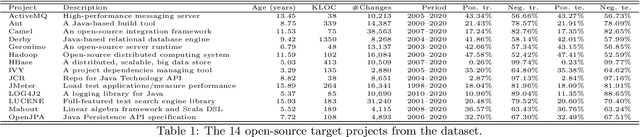
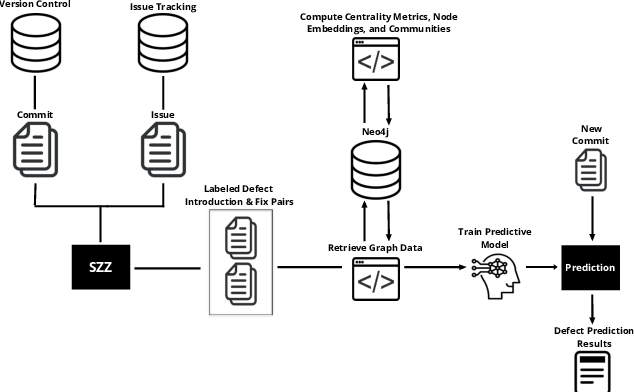

The increasing complexity of today's software requires the contribution of thousands of developers. This complex collaboration structure makes developers more likely to introduce defect-prone changes that lead to software faults. Determining when these defect-prone changes are introduced has proven challenging, and using traditional machine learning (ML) methods to make these determinations seems to have reached a plateau. In this work, we build contribution graphs consisting of developers and source files to capture the nuanced complexity of changes required to build software. By leveraging these contribution graphs, our research shows the potential of using graph-based ML to improve Just-In-Time (JIT) defect prediction. We hypothesize that features extracted from the contribution graphs may be better predictors of defect-prone changes than intrinsic features derived from software characteristics. We corroborate our hypothesis using graph-based ML for classifying edges that represent defect-prone changes. This new framing of the JIT defect prediction problem leads to remarkably better results. We test our approach on 14 open-source projects and show that our best model can predict whether or not a code change will lead to a defect with an F1 score as high as 86.25$\%$. This represents an increase of as much as 55.4$\%$ over the state-of-the-art in JIT defect prediction. We describe limitations, open challenges, and how this method can be used for operational JIT defect prediction.