 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal cross-validation impacts multivariate time series subsequence anomaly detection evaluation
Jun 13, 2025Evaluating anomaly detection in multivariate time series (MTS) requires careful consideration of temporal dependencies, particularly when detecting subsequence anomalies common in fault detection scenarios. While time series cross-validation (TSCV) techniques aim to preserve temporal ordering during model evaluation, their impact on classifier performance remains underexplored. This study systematically investigates the effect of TSCV strategy on the precision-recall characteristics of classifiers trained to detect fault-like anomalies in MTS datasets. We compare walk-forward (WF) and sliding window (SW) methods across a range of validation partition configurations and classifier types, including shallow learners and deep learning (DL) classifiers. Results show that SW consistently yields higher median AUC-PR scores and reduced fold-to-fold performance variance, particularly for deep architectures sensitive to localized temporal continuity. Furthermore, we find that classifier generalization is sensitive to the number and structure of temporal partitions, with overlapping windows preserving fault signatures more effectively at lower fold counts. A classifier-level stratified analysis reveals that certain algorithms, such as random forests (RF), maintain stable performance across validation schemes, whereas others exhibit marked sensitivity. This study demonstrates that TSCV design in benchmarking anomaly detection models on streaming time series and provide guidance for selecting evaluation strategies in temporally structured learning environments.
ROAD: The Real ORNL Automotive Dynamometer Controller Area Network Intrusion Detection Dataset (with a comprehensive CAN IDS dataset survey & guide)
Dec 29, 2020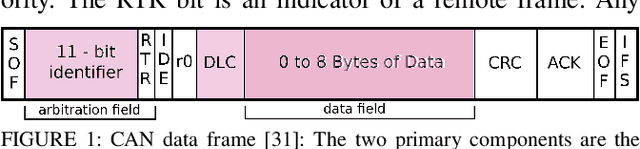
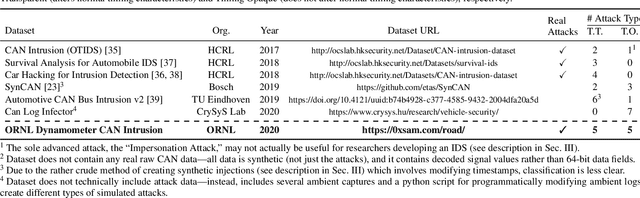
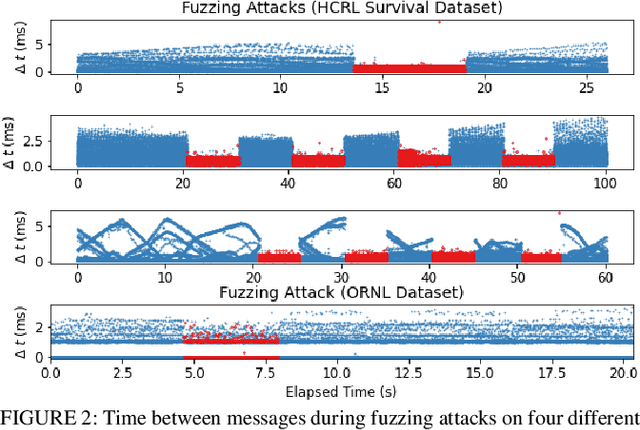
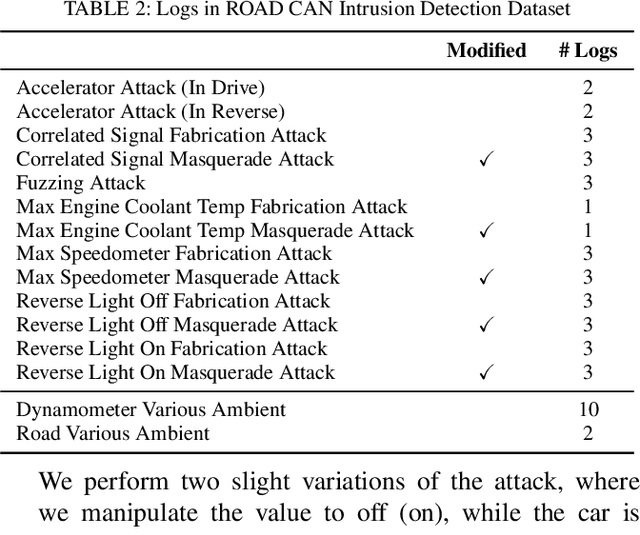
The Controller Area Network (CAN) protocol is ubiquitous in modern vehicles, but the protocol lacks many important security properties, such as message authentication. To address these insecurities, a rapidly growing field of research has emerged that seeks to detect tampering, anomalies, or attacks on these networks; this field has developed a wide variety of novel approaches and algorithms to address these problems. One major impediment to the progression of this CAN anomaly detection and intrusion detection system (IDS) research area is the lack of high-fidelity datasets with realistic labeled attacks, without which it is difficult to evaluate, compare, and validate these proposed approaches. In this work we present the first comprehensive survey of publicly available CAN intrusion datasets. Based on a thorough analysis of the data and documentation, for each dataset we provide a detailed description and enumerate the drawbacks, benefits, and suggested use cases. Our analysis is aimed at guiding researchers in finding appropriate datasets for testing a CAN IDS. We present the Real ORNL Automotive Dynamometer (ROAD) CAN Intrusion Dataset, providing the first dataset with real, advanced attacks to the existing collection of open datasets.