 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Advantage Estimates for Max@K Policy Gradients
Jun 04, 2026Reinforcement learning with verifiable rewards is widely used for post-training reasoning models, but sparse outcome rewards make exploration difficult. A complementary approach is to optimize inference-time objectives such as pass@K and max@K directly, yet existing policy-gradient estimators for these objectives use different signals, baselines, and normalizations, making their relationships unclear. We study this issue through baseline design and advantage centering. Starting from the advantage estimator of a leading method in the field, we show that it is policy-gradient unbiased but yields a non-centered advantage. We then introduce a Leave-Two-Out baseline that preserves policy-gradient unbiasedness while making realized batch advantages exactly centered. The resulting method, MaxPO, has an efficient quadratic-time implementation and integrates naturally into group-based RL for LLM post-training. We further derive the canonical finite-batch advantage for max@K, providing a unified view of existing advantage estimators. Empirically, we verify that the L2O baseline reduces gradient variance and outperforms non-centered alternatives.
Retry Policy Gradients in Continuous Action Spaces
Jun 04, 2026Retry-based objectives such as pass@K and max@K optimize the best return obtained from multiple sampled trajectories, and recent work has shown that they can promote exploration without explicit exploration bonuses. In discrete action spaces, ReMax was shown to do so by adapting to return uncertainty. In this work, we introduce pathwise derivative estimators for retry objectives and use them to extend ReMax to continuous action spaces. We study the resulting learning dynamics and show that, even with deterministic rewards, ReMax can encourage stochastic exploration by reshaping the policy-gradient landscape. In particular, it alters gradients both in direction, biasing updates toward higher policy entropy, and in magnitude, damping gradients and slowing convergence. We further show that Adam's adaptive normalization can mitigate this damping, depending on its numerical stabilization parameter. Empirically, we instantiate this objective as ReMax Actor-Critic (ReMAC), an off-policy actor--critic algorithm that optimizes the ReMax objective using a pathwise derivative estimator. Our experiments show that ReMAC can promote higher policy entropy without entropy regularization and achieves performance comparable to SAC.
OrderGrad: Optimizing Beyond the Mean with Order-Statistic Policy Gradient Estimation
Jun 04, 2026Policy-gradient methods usually optimize expected return, but many real world applications care about distributional properties of returns: tail risk, outlier robustness, or best-of-K discovery. We introduce OrderGrad, a family of likelihood-ratio and reparameterization gradient estimators for order-statistic objectives. OrderGrad optimizes finite-sample L-statistics, i.e., weighted averages of sorted rewards or costs, recovering objectives such as VaR, CVaR, trimmed means, medians, and top-m/best-of-K criteria by changing only the rank weights. For any fixed sample size and rank-weight vector, OrderGrad provides an unbiased gradient estimator for the corresponding order-statistic objective. The method is implemented as a simple reward transformation that can then be used in an otherwise standard policy-gradient or reparameterized update. We study the resulting estimator's variance behavior and evaluate it on tasks where mean optimization is mismatched to the deployment objective, including LLM math post-training and other tasks. OrderGrad provides a unified, plug-and-play route to risk-averse, robust, and exploratory learning. Code: https://github.com/paavo5/ordergrad
Emergence of Exploration in Policy Gradient Reinforcement Learning via Retrying
May 29, 2026In reinforcement learning (RL), agents benefit from exploration only because they repeatedly encounter similar states: trying different actions can improve performance or reduce uncertainty; without such retries, a greedy policy is optimal. We formalize this intuition with ReMax, an objective that evaluates a policy by the expected maximum return over $M$ samples, where $M$ is a positive integer, while accounting for return uncertainty. Optimizing this objective induces stochastic exploration as an emergent property, without explicit bonus terms. For efficient policy optimization, we derive a new policy-gradient formulation for ReMax and introduce ReMax PPO (RePPO), a PPO variant that optimizes ReMax while generalizing the discrete retry count $M$ to a continuous parameter $m > 0$, enabling fine-grained control of exploration. Empirically, RePPO promotes exploration, without any explicit exploration bonuses, on the MinAtar and Craftax benchmarks.
Finite-Time Regret Analysis of Retry-Aware Bandits
May 20, 2026We study a stochastic bandit algorithm motivated by retry-aware objectives that value the best outcome among multiple attempts, such as pass@$k$ and max@$k$. Given a posterior over arm values, ReMax chooses a sampling distribution that maximizes the posterior expected maximum reward over $M$ virtual draws. Although this objective was introduced in reinforcement learning as an exploration mechanism under uncertainty, its regret properties in bandit problems have remained unclear. For Gaussian rewards and the first nontrivial case $M=2$, we characterize the optimal ReMax distribution through an expected-improvement balance condition and prove the first sublinear regret bound for ReMax. Our analysis separates the usual saturation behavior of suboptimal arms from a ReMax-specific underestimation effect, in which the optimal arm may be sampled too rarely after an unfavorable estimate. This explains why ReMax can be more exploitative than Thompson sampling (TS) and why its regret analysis is technically delicate. Experiments support this picture: ReMax often outperforms KL-UCB and Thompson sampling under mild underestimation, while posterior-variance scaling empirically mitigates severe underestimation.
Does "Do Differentiable Simulators Give Better Policy Gradients?'' Give Better Policy Gradients?
Apr 20, 2026In policy gradient reinforcement learning, access to a differentiable model enables 1st-order gradient estimation that accelerates learning compared to relying solely on derivative-free 0th-order estimators. However, discontinuous dynamics cause bias and undermine the effectiveness of 1st-order estimators. Prior work addressed this bias by constructing a confidence interval around the REINFORCE 0th-order gradient estimator and using these bounds to detect discontinuities. However, the REINFORCE estimator is notoriously noisy, and we find that this method requires task-specific hyperparameter tuning and has low sample efficiency. This paper asks whether such bias is the primary obstacle and what minimal fixes suffice. First, we re-examine standard discontinuous settings from prior work and introduce DDCG, a lightweight test that switches estimators in nonsmooth regions; with a single hyperparameter, DDCG achieves robust performance and remains reliable with small samples. Second, on differentiable robotics control tasks, we present IVW-H, a per-step inverse-variance implementation that stabilizes variance without explicit discontinuity detection and yields strong results. Together, these findings indicate that while estimator switching improves robustness in controlled studies, careful variance control often dominates in practical deployments.
* ICLR2026
Double Horizon Model-Based Policy Optimization
Dec 17, 2025Model-based reinforcement learning (MBRL) reduces the cost of real-environment sampling by generating synthetic trajectories (called rollouts) from a learned dynamics model. However, choosing the length of the rollouts poses two dilemmas: (1) Longer rollouts better preserve on-policy training but amplify model bias, indicating the need for an intermediate horizon to mitigate distribution shift (i.e., the gap between on-policy and past off-policy samples). (2) Moreover, a longer model rollout may reduce value estimation bias but raise the variance of policy gradients due to backpropagation through multiple steps, implying another intermediate horizon for stable gradient estimates. However, these two optimal horizons may differ. To resolve this conflict, we propose Double Horizon Model-Based Policy Optimization (DHMBPO), which divides the rollout procedure into a long "distribution rollout" (DR) and a short "training rollout" (TR). The DR generates on-policy state samples for mitigating distribution shift. In contrast, the short TR leverages differentiable transitions to offer accurate value gradient estimation with stable gradient updates, thereby requiring fewer updates and reducing overall runtime. We demonstrate that the double-horizon approach effectively balances distribution shift, model bias, and gradient instability, and surpasses existing MBRL methods on continuous-control benchmarks in terms of both sample efficiency and runtime.
Near-Optimal Policy Identification in Robust Constrained Markov Decision Processes via Epigraph Form
Sep 02, 2024


Designing a safe policy for uncertain environments is crucial in real-world control applications. However, this challenge remains inadequately addressed within the Markov decision process (MDP) framework. This paper presents the first algorithm capable of identifying a near-optimal policy in a robust constrained MDP (RCMDP), where an optimal policy minimizes cumulative cost while satisfying constraints in the worst-case scenario across a set of environments. We first prove that the conventional Lagrangian max-min formulation with policy gradient methods can become trapped in suboptimal solutions by encountering a sum of conflicting gradients from the objective and constraint functions during its inner minimization problem. To address this, we leverage the epigraph form of the RCMDP problem, which resolves the conflict by selecting a single gradient from either the objective or the constraints. Building on the epigraph form, we propose a binary search algorithm with a policy gradient subroutine and prove that it identifies an $\varepsilon$-optimal policy in an RCMDP with $\tilde{\mathcal{O}}(\varepsilon^{-4})$ policy evaluations.
A unified view of likelihood ratio and reparameterization gradients
May 31, 2021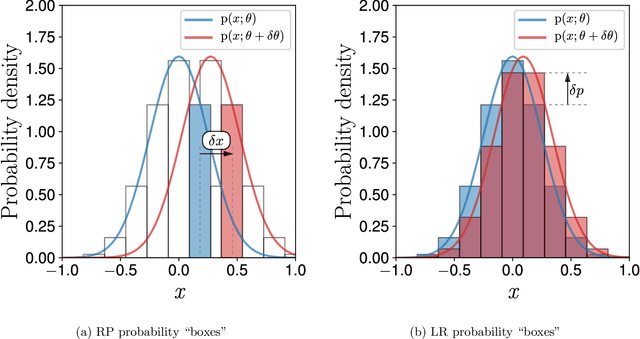
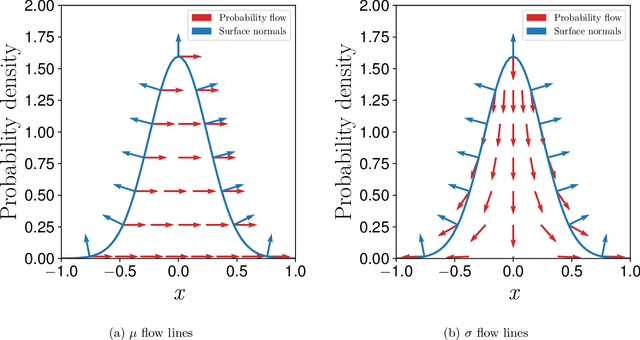


Reparameterization (RP) and likelihood ratio (LR) gradient estimators are used to estimate gradients of expectations throughout machine learning and reinforcement learning; however, they are usually explained as simple mathematical tricks, with no insight into their nature. We use a first principles approach to explain that LR and RP are alternative methods of keeping track of the movement of probability mass, and the two are connected via the divergence theorem. Moreover, we show that the space of all possible estimators combining LR and RP can be completely parameterized by a flow field $u(x)$ and an importance sampling distribution $q(x)$. We prove that there cannot exist a single-sample estimator of this type outside our characterized space, thus, clarifying where we should be searching for better Monte Carlo gradient estimators.
* AISTATS2021; Earlier paper was split in two (arXiv:1910.06419). Refer to the current paper for the unified view, but see the earlier paper for discussion on an importance sampling technique
A unified view of likelihood ratio and reparameterization gradients and an optimal importance sampling scheme
Oct 14, 2019Reparameterization (RP) and likelihood ratio (LR) gradient estimators are used throughout machine and reinforcement learning; however, they are usually explained as simple mathematical tricks without providing any insight into their nature. We use a first principles approach to explain LR and RP, and show a connection between the two via the divergence theorem. The theory motivated us to derive optimal importance sampling schemes to reduce LR gradient variance. Our newly derived distributions have analytic probability densities and can be directly sampled from. The improvement for Gaussian target distributions was modest, but for other distributions such as a Beta distribution, our method could lead to arbitrarily large improvements, and was crucial to obtain competitive performance in evolution strategies experiments.