 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Agile Tensile Perching for Aerial Robots from Demonstrations
Jul 08, 2025Perching on structures such as trees, beams, and ledges is essential for extending the endurance of aerial robots by enabling energy conservation in standby or observation modes. A tethered tensile perching mechanism offers a simple, adaptable solution that can be retrofitted to existing robots and accommodates a variety of structure sizes and shapes. However, tethered tensile perching introduces significant modelling challenges which require precise management of aerial robot dynamics, including the cases of tether slack & tension, and momentum transfer. Achieving smooth wrapping and secure anchoring by targeting a specific tether segment adds further complexity. In this work, we present a novel trajectory framework for tethered tensile perching, utilizing reinforcement learning (RL) through the Soft Actor-Critic from Demonstrations (SACfD) algorithm. By incorporating both optimal and suboptimal demonstrations, our approach enhances training efficiency and responsiveness, achieving precise control over position and velocity. This framework enables the aerial robot to accurately target specific tether segments, facilitating reliable wrapping and secure anchoring. We validate our framework through extensive simulation and real-world experiments, and demonstrate effectiveness in achieving agile and reliable trajectory generation for tensile perching.
Features characterizing safe aerial-aquatic robots
Oct 31, 2024


This paper underscores the importance of environmental monitoring, and specifically of freshwater ecosystems, which play a critical role in sustaining life and global economy. Despite their importance, insufficient data availability prevents a comprehensive understanding of these ecosystems, thereby impeding informed decision-making concerning their preservation. Aerial-aquatic robots are identified as effective tools for freshwater sensing, offering rapid deployment and avoiding the need of using ships and manned teams. To advance the field of aerial aquatic robots, this paper conducts a comprehensive review of air-water transitions focusing on the water entry strategy of existing prototypes. This analysis also highlights the safety risks associated with each transition and proposes a set of design requirements relating to robots' tasks, mission objectives, and safety measures. To further explore the proposed design requirements, we present a novel robot with VTOL capability, enabling seamless air water transitions.
* Peer-reviewed and accepted in IEEE Ubiquitous Robots 2024, New York City
Camber-changing flapping hydrofoils for efficient and environmental-safe water propulsion system
Oct 30, 2024



This research introduces a novel hydrofoil-based propulsion framework for unmanned aquatic robots, inspired by the undulating locomotion observed in select aquatic species. The proposed system incorporates a camber-modulating mechanism to enhance hydrofoil propulsive force generation and eventually efficiency. Through dynamic simulations, we validate the effectiveness of the camber-adjusting hydrofoil compared to a symmetric counterpart. The results demonstrate a significant improvement in horizontal thrust, emphasizing the potential of the cambering approach to enhance propulsive performance. Additionally, a prototype flipper design is presented, featuring individual control of heave and pitch motions, as well as a camber-adjustment mechanism. The integrated system not only provides efficient water-based propulsion but also offers the capacity for generating vertical forces during take-off maneuvers for seaplanes. The design is tailored to harness wave energy, contributing to the exploration of alternative energy resources. This work advances the understanding of bionic oscillatory principles for aquatic robots and provides a foundation for future developments in environmentally safe and agile underwater exploration.
* Peer-reviewed and accepted in Ubiquitous Robots 2024, New York City
Exploring the Potential of Multi-modal Sensing Framework for Forest Ecology
Oct 30, 2024
Forests offer essential resources and services to humanity, yet preserving and restoring them presents challenges, particularly due to the limited availability of actionable data, especially in hard-to-reach areas like forest canopies. Accessibility continues to pose a challenge for biologists collecting data in forest environments, often requiring them to invest significant time and energy in climbing trees to place sensors. This operation not only consumes resources but also exposes them to danger. Efforts in robotics have been directed towards accessing the tree canopy using robots. A swarm of drones has showcased autonomous navigation through the canopy, maneuvering with agility and evading tree collisions, all aimed at mapping the area and collecting data. However, relying solely on free-flying drones has proven insufficient for data collection. Flying drones within the canopy generates loud noise, disturbing animals and potentially corrupting the data. Additionally, commercial drones often have limited autonomy for dexterous tasks where aerial physical interaction could be required, further complicating data acquisition efforts. Aerial deployed sensor placement methods such as bio-gliders and sensor shooting have proven effective for data collection within the lower canopy. However, these methods face challenges related to retrieving the data and sensors, often necessitating human intervention.
* Peer-reviewed and accepted in IEEE ICRA 2024 Workshop RUNE
Repeatable Energy-Efficient Perching for Flapping-Wing Robots Using Soft Grippers
Sep 18, 2024



With the emergence of new flapping-wing micro aerial vehicle (FWMAV) designs, a need for extensive and advanced mission capabilities arises. FWMAVs try to adapt and emulate the flight features of birds and flying insects. While current designs already achieve high manoeuvrability, they still almost entirely lack perching and take-off abilities. These capabilities could, for instance, enable long-term monitoring and surveillance missions, and operations in cluttered environments or in proximity to humans and animals. We present the development and testing of a framework that enables repeatable perching and take-off for small to medium-sized FWMAVs, utilising soft, non-damaging grippers. Thanks to its novel active-passive actuation system, an energy-conserving state can be achieved and indefinitely maintained while the vehicle is perched. A prototype of the proposed system weighing under 39 g was manufactured and extensively tested on a 110 g flapping-wing robot. Successful free-flight tests demonstrated the full mission cycle of landing, perching and subsequent take-off. The telemetry data recorded during the flights yields extensive insight into the system's behaviour and is a valuable step towards full automation and optimisation of the entire take-off and landing cycle.
Aerial Tensile Perching and Disentangling Mechanism for Long-Term Environmental Monitoring
Mar 05, 2024Aerial robots show significant potential for forest canopy research and environmental monitoring by providing data collection capabilities at high spatial and temporal resolutions. However, limited flight endurance hinders their application. Inspired by natural perching behaviours, we propose a multi-modal aerial robot system that integrates tensile perching for energy conservation and a suspended actuated pod for data collection. The system consists of a quadrotor drone, a slewing ring mechanism allowing 360{\deg} tether rotation, and a streamlined pod with two ducted propellers connected via a tether. Winding and unwinding the tether allows the pod to move within the canopy, and activating the propellers allows the tether to be wrapped around branches for perching or disentangling. We experimentally determined the minimum counterweights required for stable perching under various conditions. Building on this, we devised and evaluated multiple perching and disentangling strategies. Comparisons of perching and disentangling manoeuvres demonstrate energy savings that could be further maximized with the use of the pod or tether winding. These approaches can reduce energy consumption to only 22\% and 1.5\%, respectively, compared to a drone disentangling manoeuvre. We also calculated the minimum idle time required by the proposed system after the system perching and motor shut down to save energy on a mission, which is 48.9\% of the operating time. Overall, the integrated system expands the operational capabilities and enhances the energy efficiency of aerial robots for long-term monitoring tasks.
Gotta catch 'em all, safely! Aerial-deployed soft underwater gripper
Mar 04, 2024
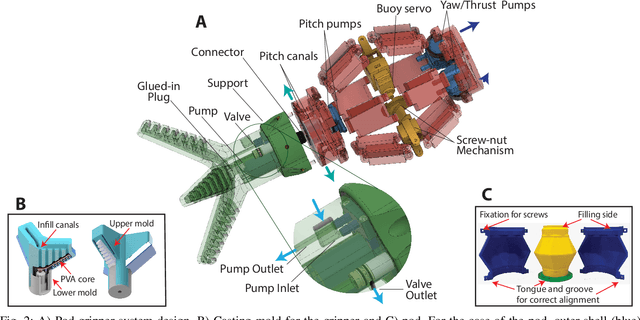


Underwater soft grippers exhibit potential for applications such as monitoring, research, and object retrieval. However, existing underwater gripping techniques frequently cause disturbances to ecosystems. In response to this challenge, we present a novel underwater gripping framework comprising a lightweight gripper affixed to a custom submarine pod deployable via drone. This approach minimizes water disturbance and enables efficient navigation to target areas, enhancing overall mission effectiveness. The pod allows for underwater motion and is characterized by four degrees of freedom. It is provided with a custom buoyancy system, two water pumps for differential thrust and two for pitching. The system allows for buoyancy adjustments up to a depth of 6 meters, as well as motion in the plane. The 3-fingered gripper is manufactured out of silicone and was successfully tested on objects with different shapes and sizes, demonstrating a maximum pulling force of up to 8 N when underwater. The reliability of the submarine pod was tested in a water tank by tracking its attitude and energy consumption during grasping maneuvers. The system also accomplished a successful mission in a lake, where it was deployed on a hexacopter. Overall, the integration of this system expands the operational capabilities of underwater grasping, makes grasping missions more efficient and easy to automate, as well as causing less disturbance to the water ecosystem.