 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatiotemporal modeling of grip forces captures proficiency in manual robot control
Mar 03, 2023



This paper builds on our previous work by exploiting Artificial Intelligence to predict individual grip force variability in manual robot control. Grip forces were recorded from various loci in the dominant and non dominant hands of individuals by means of wearable wireless sensor technology. Statistical analyses bring to the fore skill specific temporal variations in thousands of grip forces of a complete novice and a highly proficient expert in manual robot control. A brain inspired neural network model that uses the output metric of a Self Organizing Map with unsupervised winner take all learning was run on the sensor output from both hands of each user. The neural network metric expresses the difference between an input representation and its model representation at any given moment in time t and reliably captures the differences between novice and expert performance in terms of grip force variability.Functionally motivated spatiotemporal analysis of individual average grip forces, computed for time windows of constant size in the output of a restricted amount of task-relevant sensors in the dominant (preferred) hand, reveal finger-specific synergies reflecting robotic task skill. The analyses lead the way towards grip force monitoring in real time to permit tracking task skill evolution in trainees, or identify individual proficiency levels in human robot interaction in environmental contexts of high sensory uncertainty. Parsimonious Artificial Intelligence (AI) assistance will contribute to the outcome of new types of surgery, in particular single-port approaches such as NOTES (Natural Orifice Transluminal Endoscopic Surgery) and SILS (Single Incision Laparoscopic Surgery).
Semi-supervised GAN for Bladder Tissue Classification in Multi-Domain Endoscopic Images
Dec 21, 2022



Objective: Accurate visual classification of bladder tissue during Trans-Urethral Resection of Bladder Tumor (TURBT) procedures is essential to improve early cancer diagnosis and treatment. During TURBT interventions, White Light Imaging (WLI) and Narrow Band Imaging (NBI) techniques are used for lesion detection. Each imaging technique provides diverse visual information that allows clinicians to identify and classify cancerous lesions. Computer vision methods that use both imaging techniques could improve endoscopic diagnosis. We address the challenge of tissue classification when annotations are available only in one domain, in our case WLI, and the endoscopic images correspond to an unpaired dataset, i.e. there is no exact equivalent for every image in both NBI and WLI domains. Method: We propose a semi-surprised Generative Adversarial Network (GAN)-based method composed of three main components: a teacher network trained on the labeled WLI data; a cycle-consistency GAN to perform unpaired image-to-image translation, and a multi-input student network. To ensure the quality of the synthetic images generated by the proposed GAN we perform a detailed quantitative, and qualitative analysis with the help of specialists. Conclusion: The overall average classification accuracy, precision, and recall obtained with the proposed method for tissue classification are 0.90, 0.88, and 0.89 respectively, while the same metrics obtained in the unlabeled domain (NBI) are 0.92, 0.64, and 0.94 respectively. The quality of the generated images is reliable enough to deceive specialists. Significance: This study shows the potential of using semi-supervised GAN-based classification to improve bladder tissue classification when annotations are limited in multi-domain data.
Autonomous Intraluminal Navigation of a Soft Robot using Deep-Learning-based Visual Servoing
Jul 01, 2022
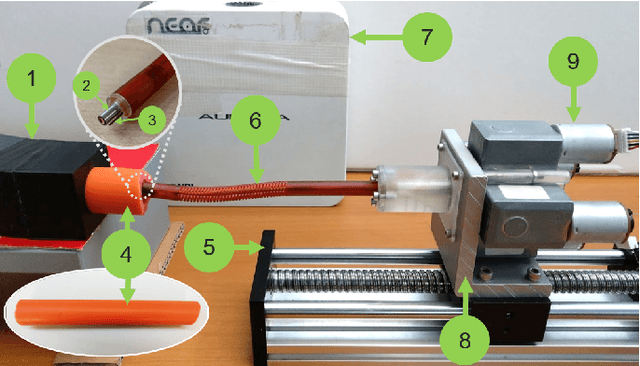
Navigation inside luminal organs is an arduous task that requires non-intuitive coordination between the movement of the operator's hand and the information obtained from the endoscopic video. The development of tools to automate certain tasks could alleviate the physical and mental load of doctors during interventions, allowing them to focus on diagnosis and decision-making tasks. In this paper, we present a synergic solution for intraluminal navigation consisting of a 3D printed endoscopic soft robot that can move safely inside luminal structures. Visual servoing, based on Convolutional Neural Networks (CNNs) is used to achieve the autonomous navigation task. The CNN is trained with phantoms and in-vivo data to segment the lumen, and a model-less approach is presented to control the movement in constrained environments. The proposed robot is validated in anatomical phantoms in different path configurations. We analyze the movement of the robot using different metrics such as task completion time, smoothness, error in the steady-state, and mean and maximum error. We show that our method is suitable to navigate safely in hollow environments and conditions which are different than the ones the network was originally trained on.
Data Stream Stabilization for Optical Coherence Tomography Volumetric Scanning
Dec 02, 2021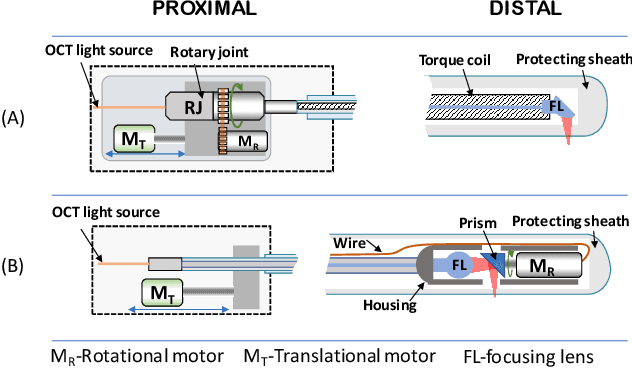
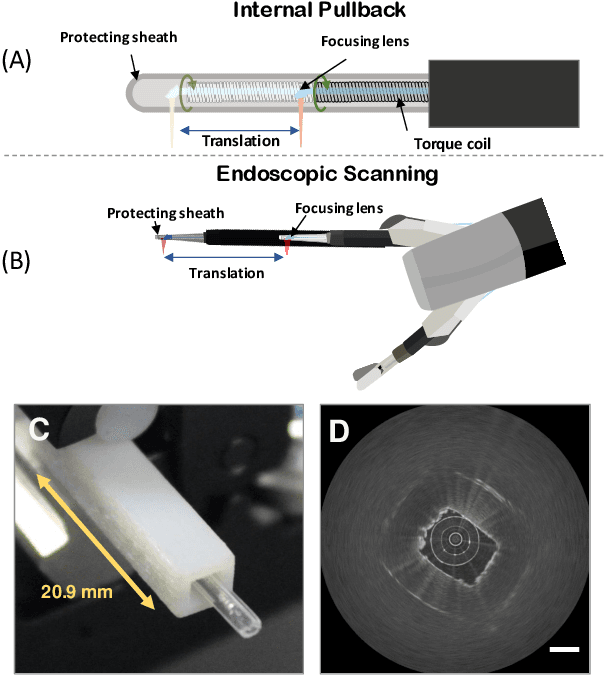
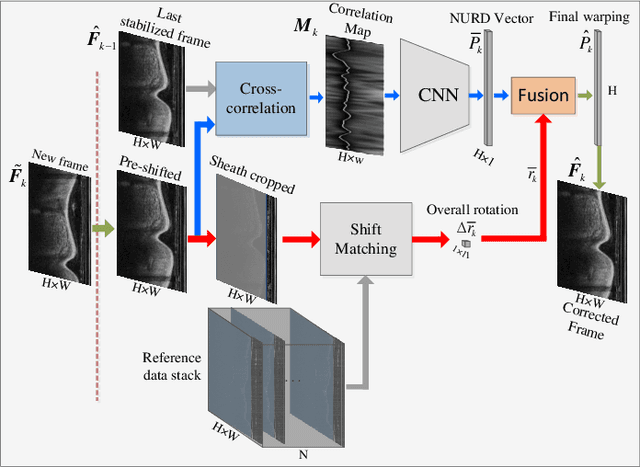
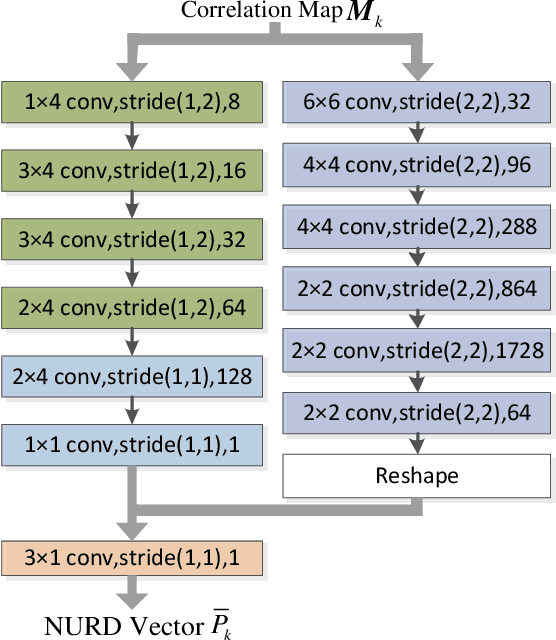
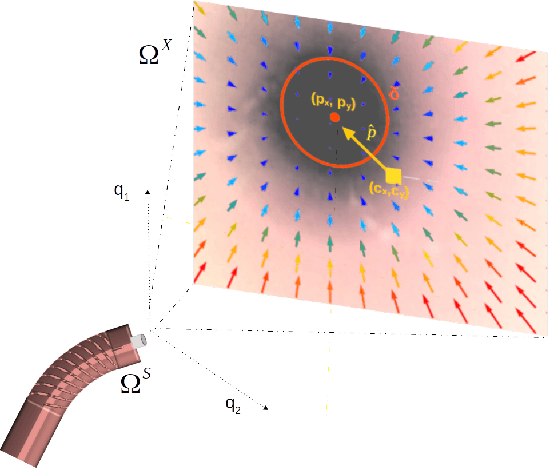
Optical Coherence Tomography (OCT) is an emerging medical imaging modality for luminal organ diagnosis. The non-constant rotation speed of optical components in the OCT catheter tip causes rotational distortion in OCT volumetric scanning. By improving the scanning process, this instability can be partially reduced. To further correct the rotational distortion in the OCT image, a volumetric data stabilization algorithm is proposed. The algorithm first estimates the Non-Uniform Rotational Distortion (NURD) for each B-scan by using a Convolutional Neural Network (CNN). A correlation map between two successive B-scans is computed and provided as input to the CNN. To solve the problem of accumulative error in iterative frame stream processing, we deploy an overall rotation estimation between reference orientation and actual OCT image orientation. We train the network with synthetic OCT videos by intentionally adding rotational distortion into real OCT images. As part of this article we discuss the proposed method in two different scanning modes: the first is a conventional pullback mode where the optical components move along the protection sheath, and the second is a self-designed scanning mode where the catheter is globally translated by using an external actuator. The efficiency and robustness of the proposed method are evaluated with synthetic scans as well as real scans under two scanning modes.
* 11pages, 5 figures
A transfer-learning approach for lesion detection in endoscopic images from the urinary tract
Apr 08, 2021
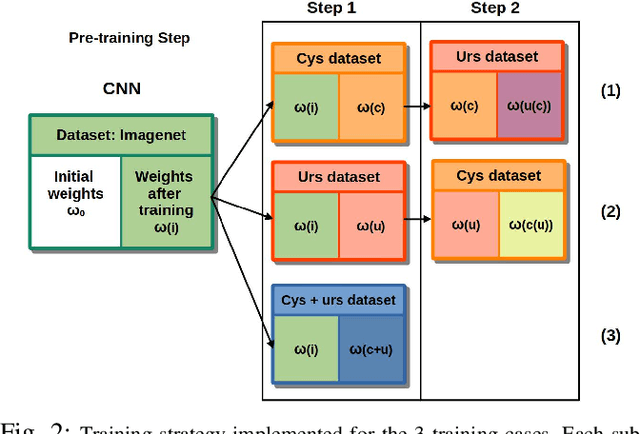
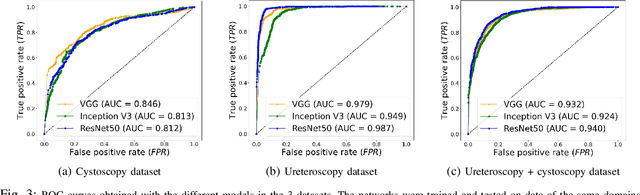
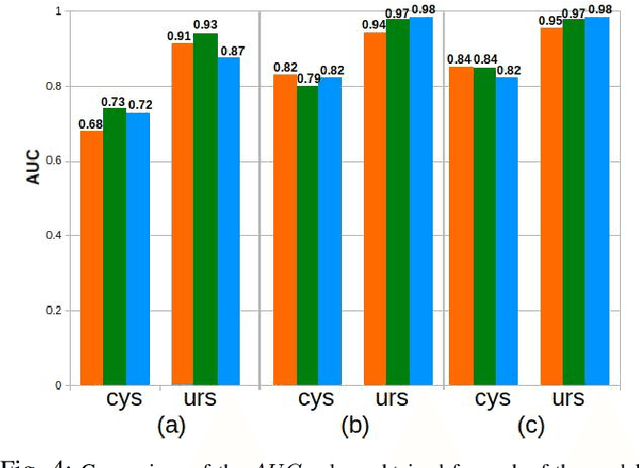
Ureteroscopy and cystoscopy are the gold standard methods to identify and treat tumors along the urinary tract. It has been reported that during a normal procedure a rate of 10-20 % of the lesions could be missed. In this work we study the implementation of 3 different Convolutional Neural Networks (CNNs), using a 2-steps training strategy, to classify images from the urinary tract with and without lesions. A total of 6,101 images from ureteroscopy and cystoscopy procedures were collected. The CNNs were trained and tested using transfer learning in a two-steps fashion on 3 datasets. The datasets used were: 1) only ureteroscopy images, 2) only cystoscopy images and 3) the combination of both of them. For cystoscopy data, VGG performed better obtaining an Area Under the ROC Curve (AUC) value of 0.846. In the cases of ureteroscopy and the combination of both datasets, ResNet50 achieved the best results with AUC values of 0.987 and 0.940. The use of a training dataset that comprehends both domains results in general better performances, but performing a second stage of transfer learning achieves comparable ones. There is no single model which performs better in all scenarios, but ResNet50 is the network that achieves the best performances in most of them. The obtained results open the opportunity for further investigation with a view for improving lesion detection in endoscopic images of the urinary system.
Using spatial-temporal ensembles of convolutional neural networks for lumen segmentation in ureteroscopy
Apr 05, 2021
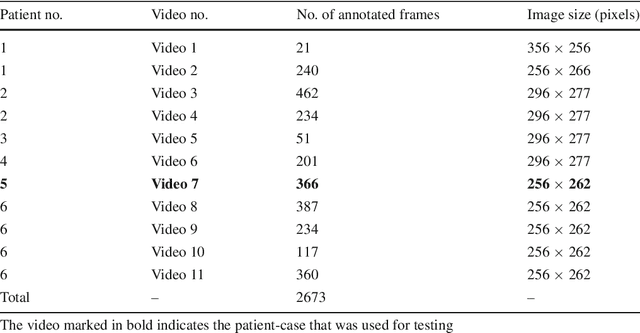
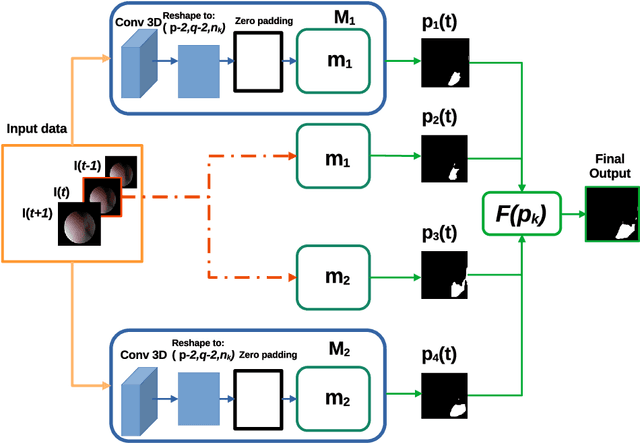
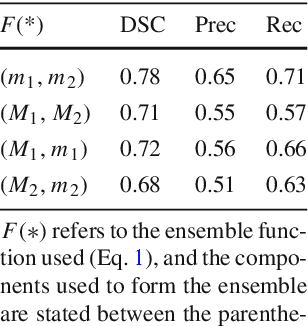
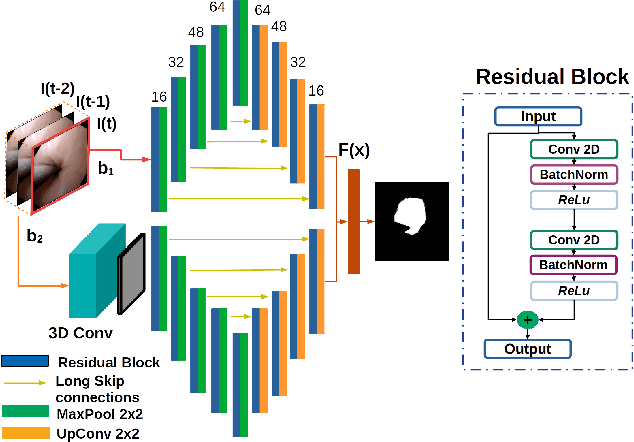
Purpose: Ureteroscopy is an efficient endoscopic minimally invasive technique for the diagnosis and treatment of upper tract urothelial carcinoma (UTUC). During ureteroscopy, the automatic segmentation of the hollow lumen is of primary importance, since it indicates the path that the endoscope should follow. In order to obtain an accurate segmentation of the hollow lumen, this paper presents an automatic method based on Convolutional Neural Networks (CNNs). Methods: The proposed method is based on an ensemble of 4 parallel CNNs to simultaneously process single and multi-frame information. Of these, two architectures are taken as core-models, namely U-Net based in residual blocks($m_1$) and Mask-RCNN($m_2$), which are fed with single still-frames $I(t)$. The other two models ($M_1$, $M_2$) are modifications of the former ones consisting on the addition of a stage which makes use of 3D Convolutions to process temporal information. $M_1$, $M_2$ are fed with triplets of frames ($I(t-1)$, $I(t)$, $I(t+1)$) to produce the segmentation for $I(t)$. Results: The proposed method was evaluated using a custom dataset of 11 videos (2,673 frames) which were collected and manually annotated from 6 patients. We obtain a Dice similarity coefficient of 0.80, outperforming previous state-of-the-art methods. Conclusion: The obtained results show that spatial-temporal information can be effectively exploited by the ensemble model to improve hollow lumen segmentation in ureteroscopic images. The method is effective also in presence of poor visibility, occasional bleeding, or specular reflections.
Deep Reinforcement Learning for the Control of Robotic Manipulation: A Focussed Mini-Review
Feb 08, 2021
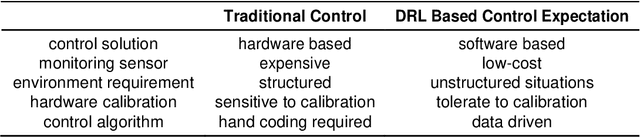

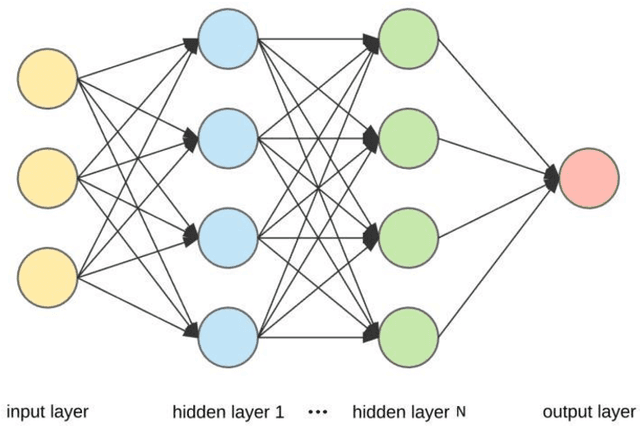
Deep learning has provided new ways of manipulating, processing and analyzing data. It sometimes may achieve results comparable to, or surpassing human expert performance, and has become a source of inspiration in the era of artificial intelligence. Another subfield of machine learning named reinforcement learning, tries to find an optimal behavior strategy through interactions with the environment. Combining deep learning and reinforcement learning permits resolving critical issues relative to the dimensionality and scalability of data in tasks with sparse reward signals, such as robotic manipulation and control tasks, that neither method permits resolving when applied on its own. In this paper, we present recent significant progress of deep reinforcement learning algorithms, which try to tackle the problems for the application in the domain of robotic manipulation control, such as sample efficiency and generalization. Despite these continuous improvements, currently, the challenges of learning robust and versatile manipulation skills for robots with deep reinforcement learning are still far from being resolved for real world applications.
Wearable Sensors for Spatio-Temporal Grip Force Profiling
Jan 16, 2021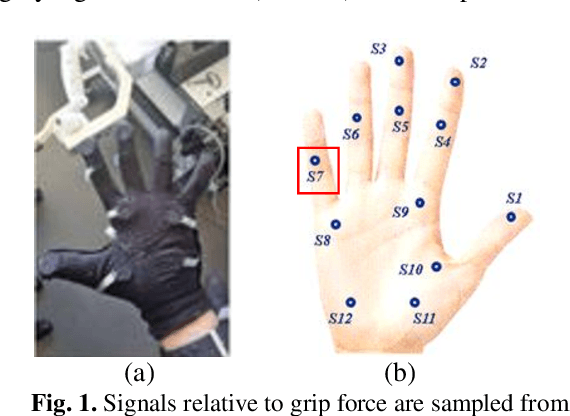
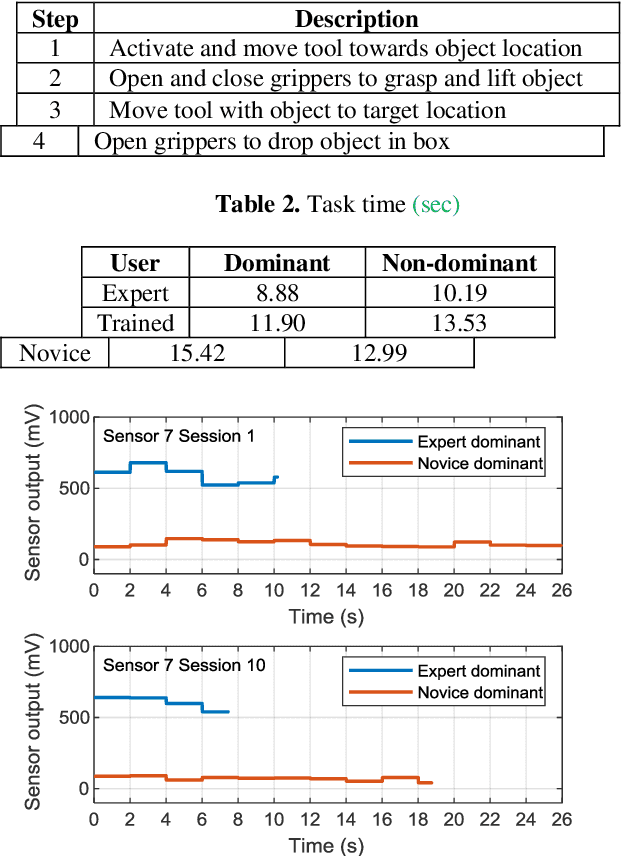
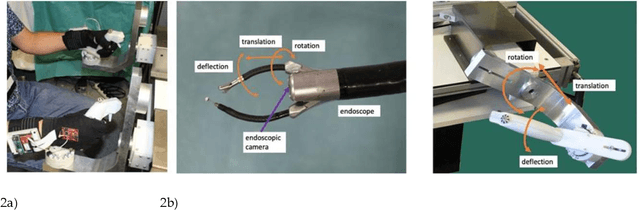
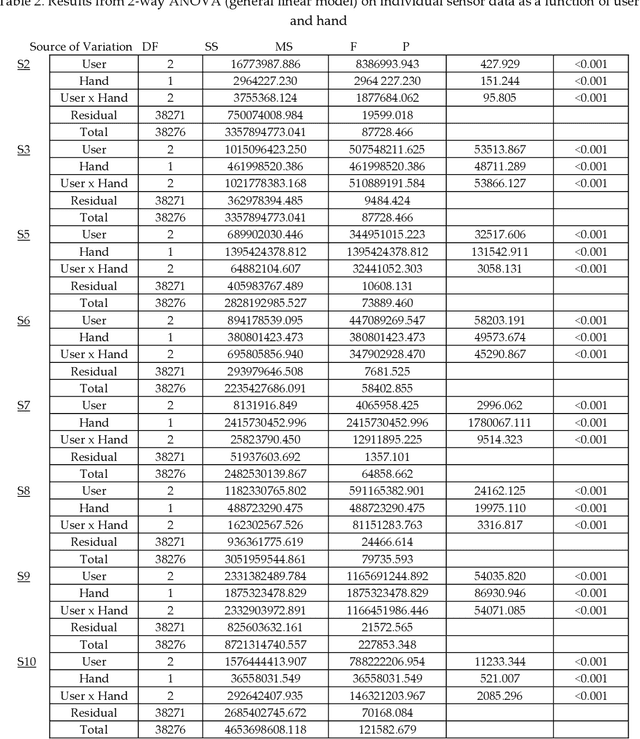
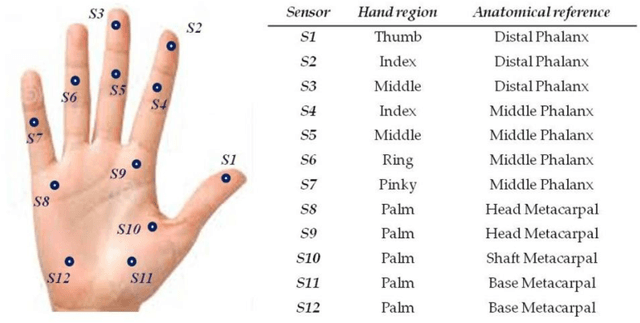
Wearable biosensor technology enables real-time, convenient, and continuous monitoring of users behavioral signals. Such include signals relative to body motion, body temperature, biological or biochemical markers, and individual grip forces, which are studied in this paper. A four step pick and drop image guided and robot assisted precision task has been designed for exploiting a wearable wireless sensor glove system. Individual spatio temporal grip forces are analyzed on the basis of thousands of individual sensor data, collected from different locations on the dominant and non-dominant hands of each of three users in ten successive task sessions. Statistical comparisons reveal specific differences between grip force profiles of the individual users as a function of task skill level (expertise) and time.
A Lumen Segmentation Method in Ureteroscopy Images based on a Deep Residual U-Net architecture
Jan 13, 2021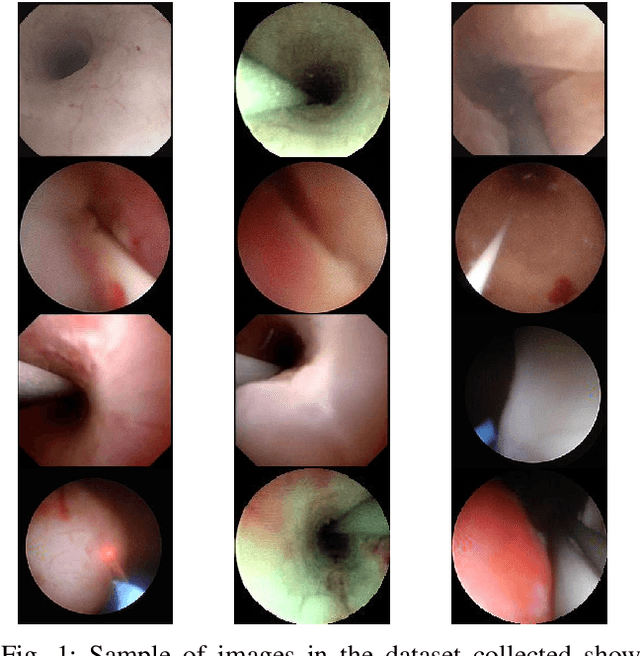
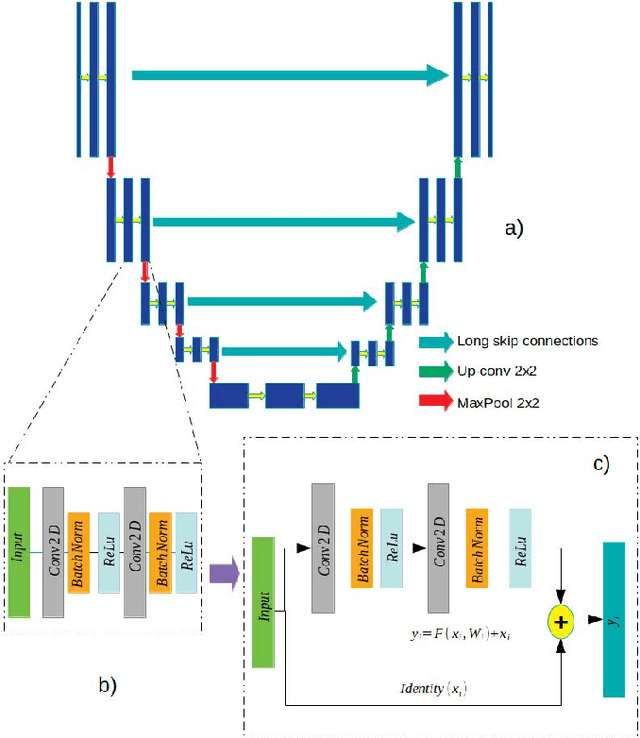
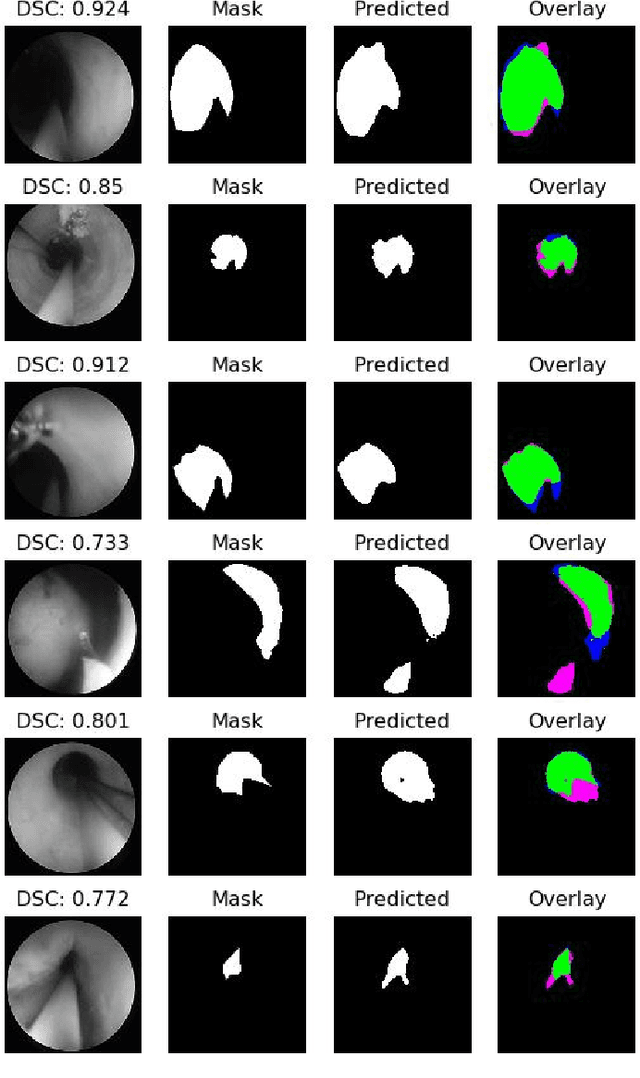
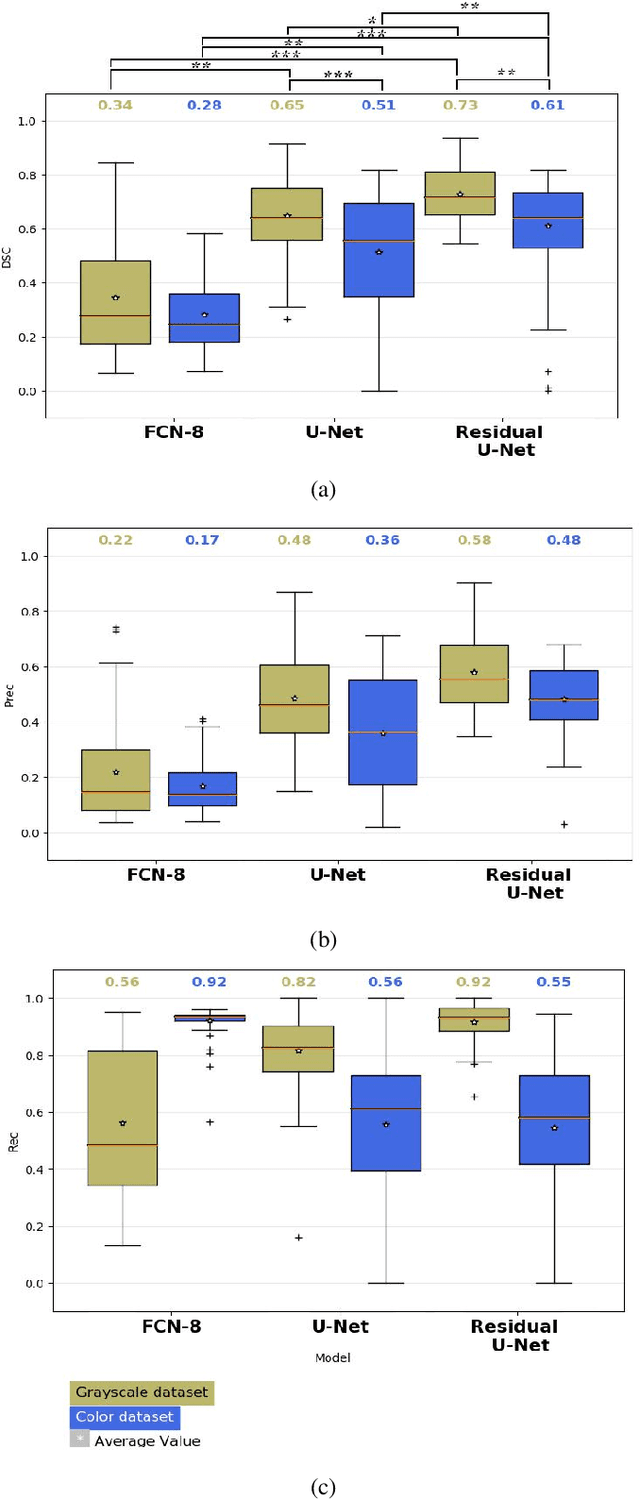
Ureteroscopy is becoming the first surgical treatment option for the majority of urinary affections. This procedure is performed using an endoscope which provides the surgeon with the visual information necessary to navigate inside the urinary tract. Having in mind the development of surgical assistance systems, that could enhance the performance of surgeon, the task of lumen segmentation is a fundamental part since this is the visual reference which marks the path that the endoscope should follow. This is something that has not been analyzed in ureteroscopy data before. However, this task presents several challenges given the image quality and the conditions itself of ureteroscopy procedures. In this paper, we study the implementation of a Deep Neural Network which exploits the advantage of residual units in an architecture based on U-Net. For the training of these networks, we analyze the use of two different color spaces: gray-scale and RGB data images. We found that training on gray-scale images gives the best results obtaining mean values of Dice Score, Precision, and Recall of 0.73, 0.58, and 0.92 respectively. The results obtained shows that the use of residual U-Net could be a suitable model for further development for a computer-aided system for navigation and guidance through the urinary system.
Correlating grip force signals from multiple sensors highlights prehensile control strategies in a complex task-user system
Nov 12, 2020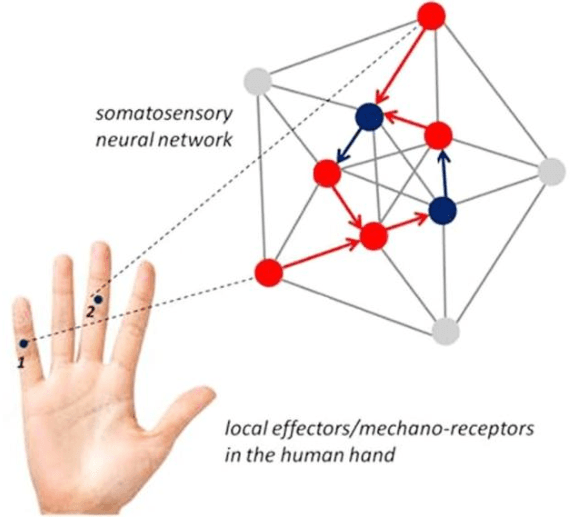
Wearable sensor systems with transmitting capabilities are currently employed for the biometric screening of exercise activities and other performance data. Such technology is generally wireless and enables the noninvasive monitoring of signals to track and trace user behaviors in real time. Examples include signals relative to hand and finger movements or force control reflected by individual grip force data. As will be shown here, these signals directly translate into task, skill, and hand specific, dominant versus non dominant hand, grip force profiles for different measurement loci in the fingers and palm of the hand. The present study draws from thousands of such sensor data recorded from multiple spatial locations. The individual grip force profiles of a highly proficient left handed exper, a right handed dominant hand trained user, and a right handed novice performing an image guided, robot assisted precision task with the dominant or the non dominant hand are analyzed. The step by step statistical approach follows Tukeys detective work principle, guided by explicit functional assumptions relating to somatosensory receptive field organization in the human brain. Correlation analyses in terms of Person Product Moments reveal skill specific differences in covariation patterns in the individual grip force profiles. These can be functionally mapped to from global to local coding principles in the brain networks that govern grip force control and its optimization with a specific task expertise. Implications for the real time monitoring of grip forces and performance training in complex task user systems are brought forward.