 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOSCAR: An Ovipositor-Inspired Self-Propelling Capsule Robot for Colonoscopy
Feb 17, 2026Self-propelling robotic capsules eliminate shaft looping of conventional colonoscopy, reducing patient discomfort. However, reliably moving within the slippery, viscoelastic environment of the colon remains a significant challenge. We present OSCAR, an ovipositor-inspired self-propelling capsule robot that translates the transport strategy of parasitic wasps into a propulsion mechanism for colonoscopy. OSCAR mechanically encodes the ovipositor-inspired motion pattern through a spring-loaded cam system that drives twelve circumferential sliders in a coordinated, phase-shifted sequence. By tuning the motion profile to maximize the retract phase relative to the advance phase, the capsule creates a controlled friction anisotropy at the interface that generates net forward thrust. We developed an analytical model incorporating a Kelvin-Voigt formulation to capture the viscoelastic stick--slip interactions between the sliders and the tissue, linking the asymmetry between advance and retract phase durations to mean thrust, and slider-reversal synchronization to thrust stability. Comprehensive force characterization experiments in ex-vivo porcine colon revealed a mean steady-state traction force of 0.85 N, closely matching the model. Furthermore, experiments confirmed that thrust generation is speed-independent and scales linearly with the phase asymmetry, in agreement with theoretical predictions, underscoring the capsule's predictable performance and scalability. In locomotion validation experiments, OSCAR demonstrated robust performance, achieving an average speed of 3.08 mm/s, a velocity sufficient to match the cecal intubation times of conventional colonoscopy. By coupling phase-encoded friction anisotropy with a predictive model, OSCAR delivers controllable thrust generation at low normal loads, enabling safer and more robust self-propelling locomotion for robotic capsule colonoscopy.
Grip as Needed, Glide on Demand: Ultrasonic Lubrication for Robotic Locomotion
Feb 17, 2026Friction is the essential mediator of terrestrial locomotion, yet in robotic systems it is almost always treated as a passive property fixed by surface materials and conditions. Here, we introduce ultrasonic lubrication as a method to actively control friction in robotic locomotion. By exciting resonant structures at ultrasonic frequencies, contact interfaces can dynamically switch between "grip" and "slip" states, enabling locomotion. We developed two friction control modules, a cylindrical design for lumen-like environments and a flat-plate design for external surfaces, and integrated them into bio-inspired systems modeled after inchworm and wasp ovipositor locomotion. Both systems achieved bidirectional locomotion with nearly perfect locomotion efficiencies that exceeded 90%. Friction characterization experiments further demonstrated substantial friction reduction across various surfaces, including rigid, soft, granular, and biological tissue interfaces, under dry and wet conditions, and on surfaces with different levels of roughness, confirming the broad applicability of ultrasonic lubrication to locomotion tasks. These findings establish ultrasonic lubrication as a viable active friction control mechanism for robotic locomotion, with the potential to reduce design complexity and improve efficiency of robotic locomotion systems.
Mechanically-Inflatable Bio-Inspired Locomotion for Robotic Pipeline Inspection
Nov 07, 2023Pipelines, vital for fluid transport, pose an important yet challenging inspection task, particularly in small, flexible biological systems, that robots have yet to master. In this study, we explored the development of an innovative robot inspired by the ovipositor of parasitic wasps to navigate and inspect pipelines. The robot features a flexible locomotion system that adapts to different tube sizes and shapes through a mechanical inflation technique. The flexible locomotion system employs a reciprocating motion, in which groups of three sliders extend and retract in a cyclic fashion. In a proof-of-principle experiment, the robot locomotion efficiency demonstrated positive linear correlation (r=0.6434) with the diameter ratio (ratio of robot diameter to tube diameter). The robot showcased a remarkable ability to traverse tubes of different sizes, shapes and payloads with an average of (70%) locomotion efficiency across all testing conditions, at varying diameter ratios (0.7-1.5). Furthermore, the mechanical inflation mechanism displayed substantial load-carrying capacity, producing considerable holding force of (13 N), equivalent to carrying a payload of approximately (5.8 Kg) inclusive the robot weight. This novel soft robotic system shows promise for inspection and navigation within tubular confined spaces, particularly in scenarios requiring adaptability to different tube shapes, sizes, and load-carrying capacities. This novel design serves as a foundation for a new class of pipeline inspection robots that exhibit versatility across various pipeline environments, potentially including biological systems.
Autonomous Intraluminal Navigation of a Soft Robot using Deep-Learning-based Visual Servoing
Jul 01, 2022
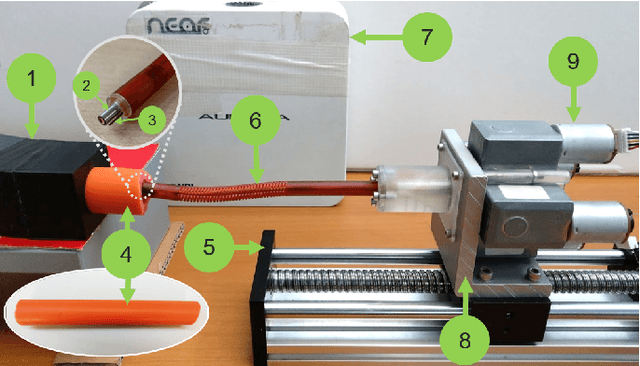
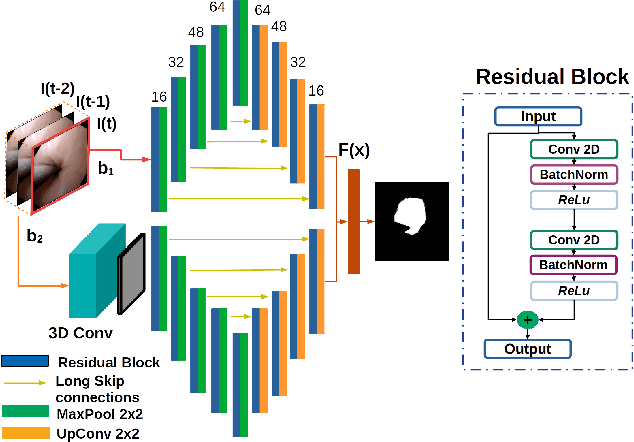
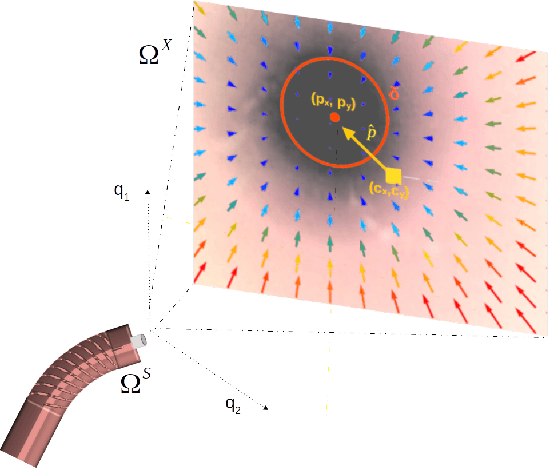
Navigation inside luminal organs is an arduous task that requires non-intuitive coordination between the movement of the operator's hand and the information obtained from the endoscopic video. The development of tools to automate certain tasks could alleviate the physical and mental load of doctors during interventions, allowing them to focus on diagnosis and decision-making tasks. In this paper, we present a synergic solution for intraluminal navigation consisting of a 3D printed endoscopic soft robot that can move safely inside luminal structures. Visual servoing, based on Convolutional Neural Networks (CNNs) is used to achieve the autonomous navigation task. The CNN is trained with phantoms and in-vivo data to segment the lumen, and a model-less approach is presented to control the movement in constrained environments. The proposed robot is validated in anatomical phantoms in different path configurations. We analyze the movement of the robot using different metrics such as task completion time, smoothness, error in the steady-state, and mean and maximum error. We show that our method is suitable to navigate safely in hollow environments and conditions which are different than the ones the network was originally trained on.