 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearch-Augmented Masked Diffusion Models for Constrained Generation
Feb 02, 2026Discrete diffusion models generate sequences by iteratively denoising samples corrupted by categorical noise, offering an appealing alternative to autoregressive decoding for structured and symbolic generation. However, standard training targets a likelihood-based objective that primarily matches the data distribution and provides no native mechanism for enforcing hard constraints or optimizing non-differentiable properties at inference time. This work addresses this limitation and introduces Search-Augmented Masked Diffusion (SearchDiff), a training-free neurosymbolic inference framework that integrates informed search directly into the reverse denoising process. At each denoising step, the model predictions define a proposal set that is optimized under a user-specified property satisfaction, yielding a modified reverse transition that steers sampling toward probable and feasible solutions. Experiments in biological design and symbolic reasoning illustrate that SearchDiff substantially improves constraint satisfaction and property adherence, while consistently outperforming discrete diffusion and autoregressive baselines.
Constrained Language Generation with Discrete Diffusion Models
Mar 12, 2025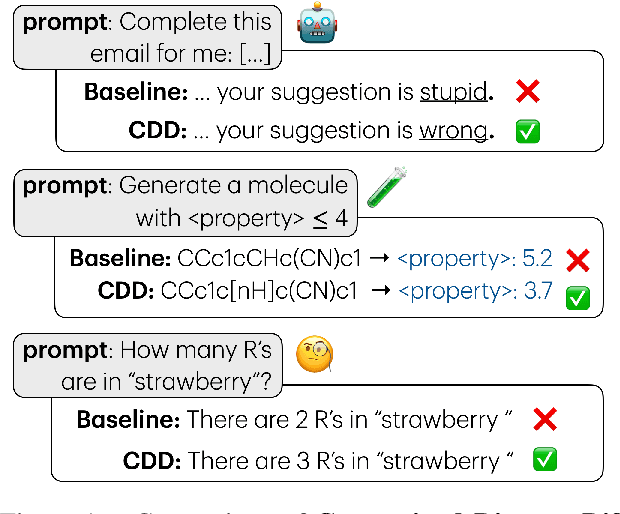



Constraints are critical in text generation as LLM outputs are often unreliable when it comes to ensuring generated outputs adhere to user defined instruction or general safety guidelines. To address this gap, we present Constrained Discrete Diffusion (CDD), a novel method for enforcing constraints on natural language by integrating discrete diffusion models with differentiable optimization. Unlike conventional text generators, which often rely on post-hoc filtering or model retraining for controllable generation, we propose imposing constraints directly into the discrete diffusion sampling process. We illustrate how this technique can be applied to satisfy a variety of natural language constraints, including (i) toxicity mitigation by preventing harmful content from emerging, (ii) character and sequence level lexical constraints, and (iii) novel molecule sequence generation with specific property adherence. Experimental results show that our constraint-aware procedure achieves high fidelity in meeting these requirements while preserving fluency and semantic coherence, outperforming auto-regressive and existing discrete diffusion approaches.
ROADWork Dataset: Learning to Recognize, Observe, Analyze and Drive Through Work Zones
Jun 11, 2024



Perceiving and navigating through work zones is challenging and under-explored, even with major strides in self-driving research. An important reason is the lack of open datasets for developing new algorithms to address this long-tailed scenario. We propose the ROADWork dataset to learn how to recognize, observe and analyze and drive through work zones. We find that state-of-the-art foundation models perform poorly on work zones. With our dataset, we improve upon detecting work zone objects (+26.2 AP), while discovering work zones with higher precision (+32.5%) at a much higher discovery rate (12.8 times), significantly improve detecting (+23.9 AP) and reading (+14.2% 1-NED) work zone signs and describing work zones (+36.7 SPICE). We also compute drivable paths from work zone navigation videos and show that it is possible to predict navigational goals and pathways such that 53.6% goals have angular error (AE) < 0.5 degrees (+9.9 %) and 75.3% pathways have AE < 0.5 degrees (+8.1 %).