 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Blocking Batch A* (Technical Report)
Aug 16, 2022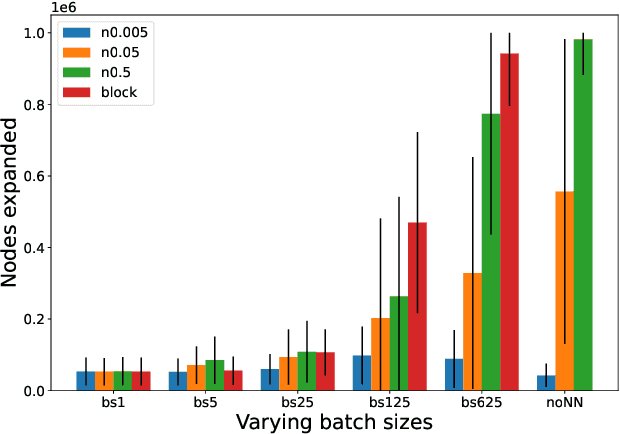
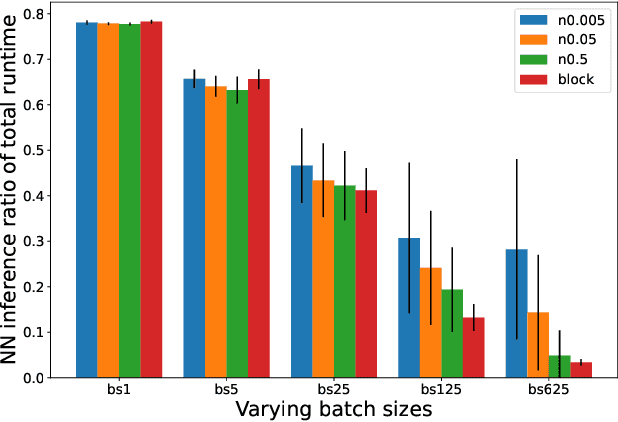
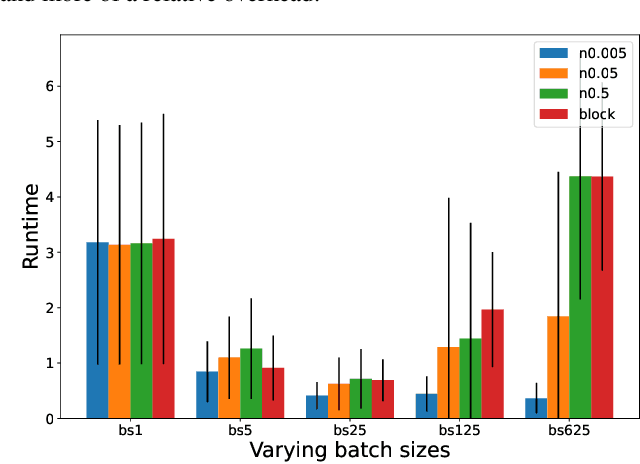
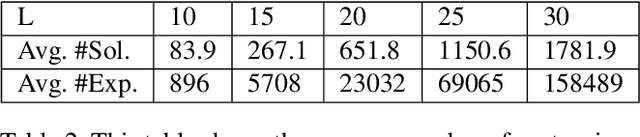
Heuristic search has traditionally relied on hand-crafted or programmatically derived heuristics. Neural networks (NNs) are newer powerful tools which can be used to learn complex mappings from states to cost-to-go heuristics. However, their slow single inference time is a large overhead that can substantially slow down planning time in optimized heuristic search implementations. Several recent works have described ways to take advantage of NN's batch computations to decrease overhead in planning, while retaining bounds on (sub)optimality. However, all these methods have used the NN heuristic in a "blocking" manner while building up their batches, and have ignored possible fast-to-compute admissible heuristics (e.g. existing classically derived heuristics) that are usually available to use. We introduce Non-Blocking Batch A* (NBBA*), a bounded suboptimal method which lazily computes the NN heuristic in batches while allowing expansions informed by a non-NN heuristic. We show how this subtle but important change can lead to substantial reductions in expansions compared to the current blocking alternative, and see that the performance is related to the information difference between the batch computed NN and fast non-NN heuristic.
Effectively Incorporating Weighted Cost-to-go Heuristic in Suboptimal CBS
May 25, 2022
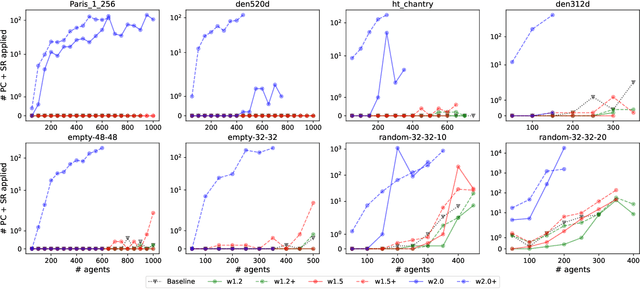
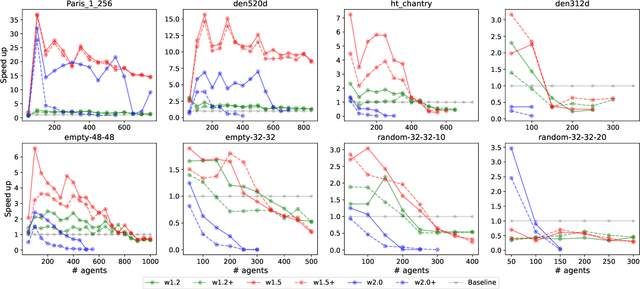
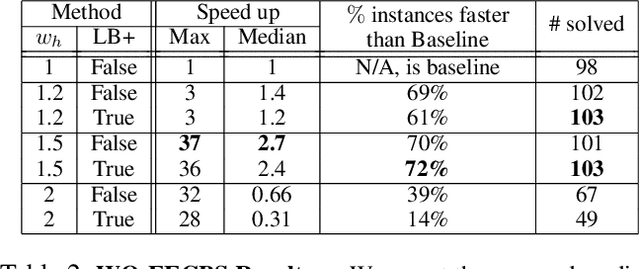
Conflict-Based Search (CBS) is a popular multi-agent path finding (MAPF) solver that employs a low-level single agent planner and a high-level constraint tree to resolve conflicts. The vast majority of modern MAPF solvers focus on improving CBS by reducing the size of this tree through various strategies with few methods modifying the low level planner. All low level planners in existing CBS methods use an unweighted cost-to-go heuristic, with suboptimal CBS methods also using a conflict heuristic to help the high level search. Contrary to prevailing beliefs, we show that the cost-to-go heuristic can be used significantly more effectively by weighting it in a specific manner alongside the conflict heuristic. We introduce two variants of doing so and demonstrate that this change can lead to 2-100x speedups in certain scenarios. Additionally, to the best of our knowledge, we show the first theoretical relation of prioritized planning and bounded suboptimal CBS and demonstrate that our methods are their natural generalization.
Synergistic Scheduling of Learning and Allocation of Tasks in Human-Robot Teams
Mar 14, 2022
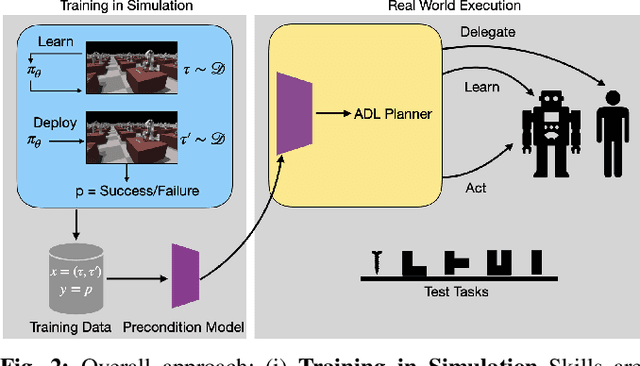
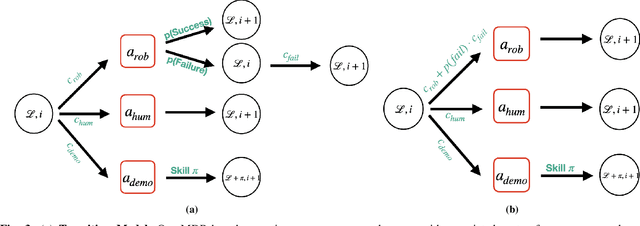
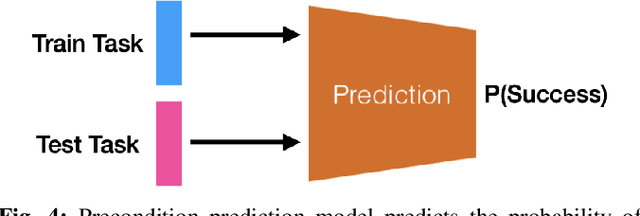
We consider the problem of completing a set of $n$ tasks with a human-robot team using minimum effort. In many domains, teaching a robot to be fully autonomous can be counterproductive if there are finitely many tasks to be done. Rather, the optimal strategy is to weigh the cost of teaching a robot and its benefit -- how many new tasks it allows the robot to solve autonomously. We formulate this as a planning problem where the goal is to decide what tasks the robot should do autonomously (act), what tasks should be delegated to a human (delegate) and what tasks the robot should be taught (learn) so as to complete all the given tasks with minimum effort. This planning problem results in a search tree that grows exponentially with $n$ -- making standard graph search algorithms intractable. We address this by converting the problem into a mixed integer program that can be solved efficiently using off-the-shelf solvers with bounds on solution quality. To predict the benefit of learning, we use an approximate simulation model of the tasks to train a precondition model that is parameterized by the training task. Finally, we evaluate our approach on peg insertion and Lego stacking tasks -- both in simulation and real-world, showing substantial savings in human effort.
ePA*SE: Edge-based Parallel A* for Slow Evaluations
Mar 02, 2022
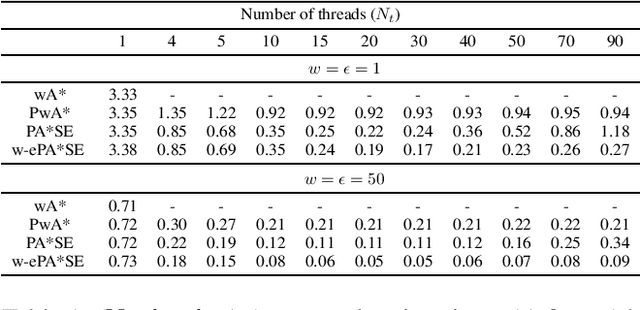
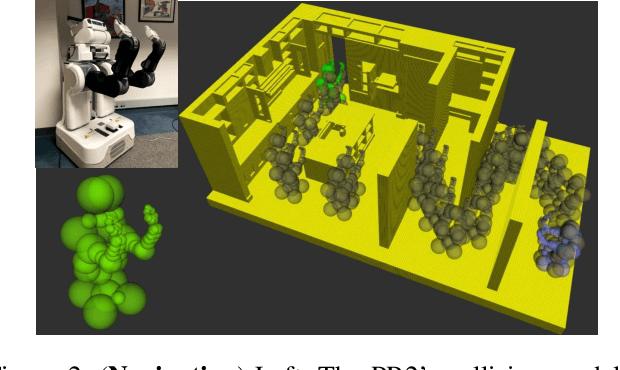
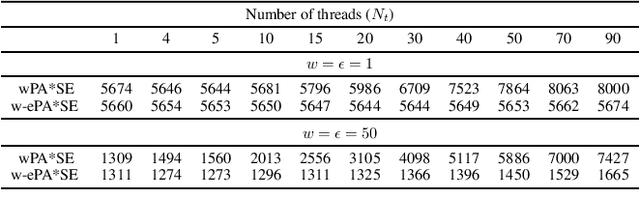
Parallel search algorithms harness the multithreading capability of modern processors to achieve faster planning. One such algorithm is PA*SE (Parallel A* for Slow Expansions), which parallelizes state expansions to achieve faster planning in domains where state expansions are slow. In this work, we propose ePA*SE (Edge-based Parallel A* for Slow Evaluations) that improves on PA*SE by parallelizing edge evaluations instead of state expansions. This makes ePA*SE more efficient in domains where edge evaluations are expensive and need varying amounts of computational effort, which is often the case in robotics. On the theoretical front, we show that ePA*SE provides rigorous optimality guarantees. In addition, ePA*SE can be trivially extended to handle an inflation weight on the heuristic resulting in a bounded suboptimal algorithm w-ePA*SE (Weighted ePA*SE) that trades off optimality for faster planning. On the experimental front, we validate the proposed algorithm in two different planning domains: 1) motion planning for 3D humanoid navigation and 2) task and motion planning for a dual-arm robotic assembly task. We show that ePA*SE can be significantly more efficient than PA*SE and other alternatives.
Enhanced Multi-Objective A* Using Balanced Binary Search Trees
Feb 18, 2022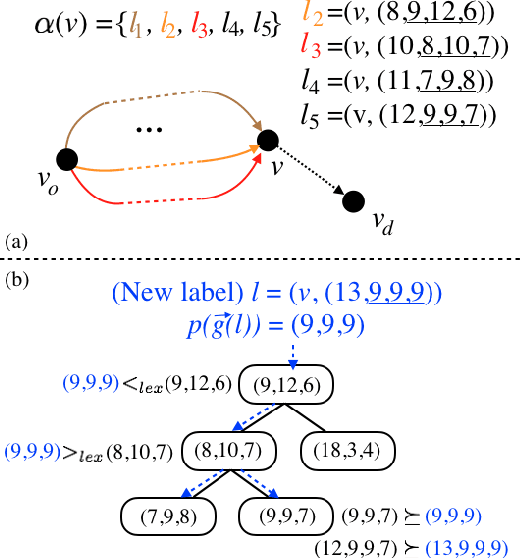

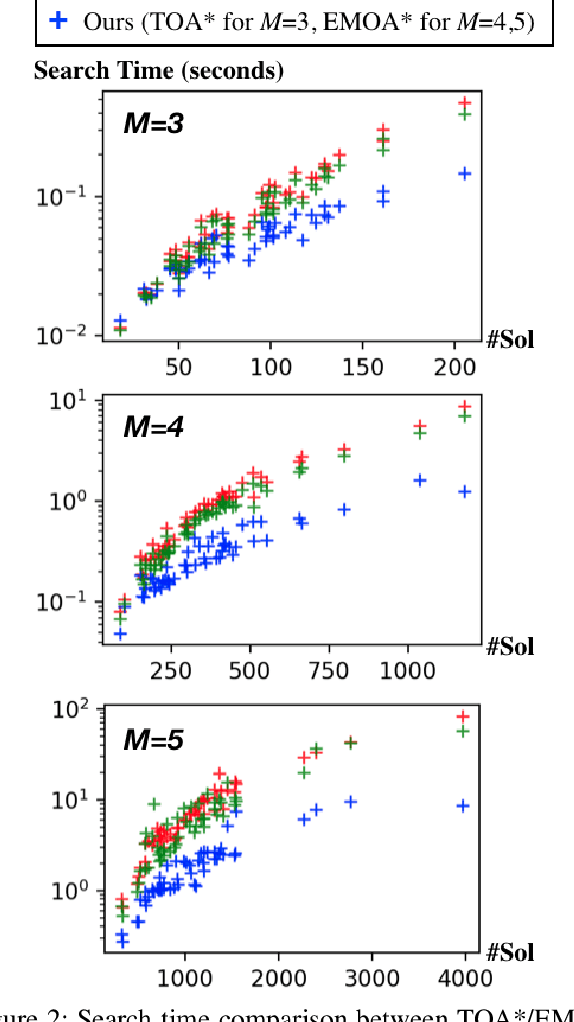
This work addresses the Multi-Objective Shortest Path Problem (MO-SPP): Given a graph where each edge is associated with a non-negative cost vector, MO-SPP aims to find all the Pareto-optimal paths connecting the given start and goal nodes. To solve MO-SPP, the popular multi-objective A* (MOA*) like algorithms maintain a "frontier" set at any node during the search to keep track of the non-dominated paths that reach that node. The computational efficiency of MOA* algorithms directly depend on how efficiently one can maintain the frontier sets. Recently, several techniques have been developed in the literature to address this issue mainly for two objectives. In this work, we introduce a new method to efficiently maintain these frontiers for multiple objectives by leveraging balanced binary search trees. We provide extensive simulation results for problems with three, four and five objectives to show that our method outperforms existing techniques by an order of magnitude in general.
On the Effectiveness of Iterative Learning Control
Nov 27, 2021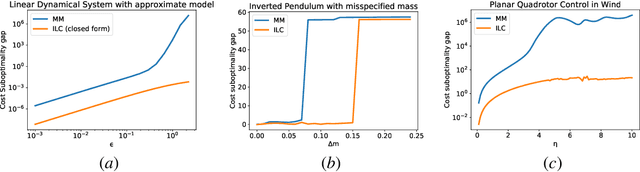
Iterative learning control (ILC) is a powerful technique for high performance tracking in the presence of modeling errors for optimal control applications. There is extensive prior work showing its empirical effectiveness in applications such as chemical reactors, industrial robots and quadcopters. However, there is little prior theoretical work that explains the effectiveness of ILC even in the presence of large modeling errors, where optimal control methods using the misspecified model (MM) often perform poorly. Our work presents such a theoretical study of the performance of both ILC and MM on Linear Quadratic Regulator (LQR) problems with unknown transition dynamics. We show that the suboptimality gap, as measured with respect to the optimal LQR controller, for ILC is lower than that for MM by higher order terms that become significant in the regime of high modeling errors. A key part of our analysis is the perturbation bounds for the discrete Ricatti equation in the finite horizon setting, where the solution is not a fixed point and requires tracking the error using recursive bounds. We back our theoretical findings with empirical experiments on a toy linear dynamical system with an approximate model, a nonlinear inverted pendulum system with misspecified mass, and a nonlinear planar quadrotor system in the presence of wind. Experiments show that ILC outperforms MM significantly, in terms of the cost of computed trajectories, when modeling errors are high.
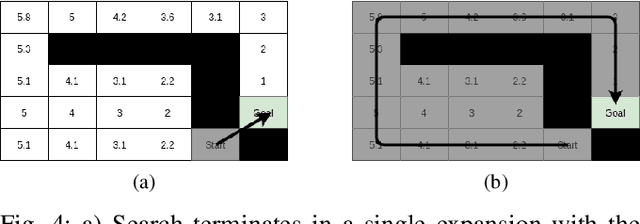
AMRA*: Anytime Multi-Resolution Multi-Heuristic A*
Oct 11, 2021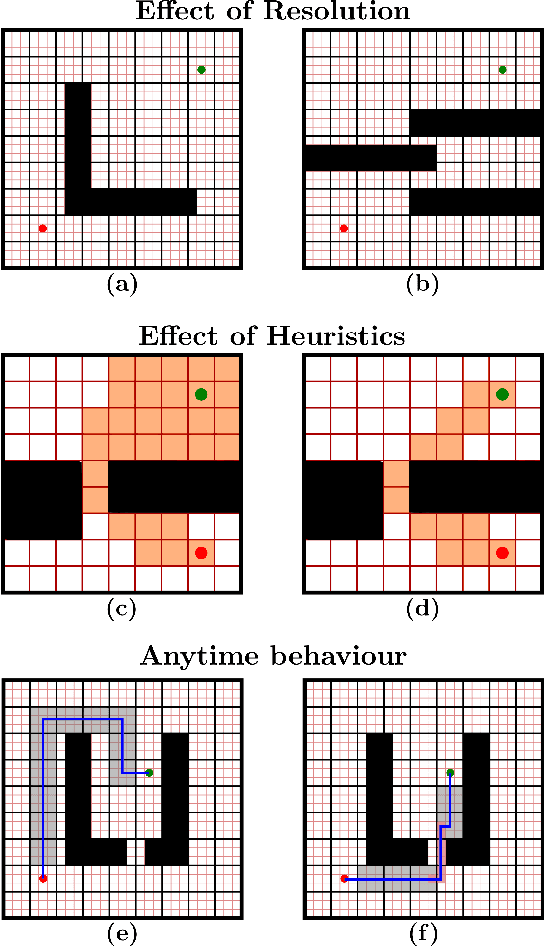
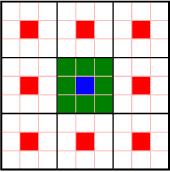
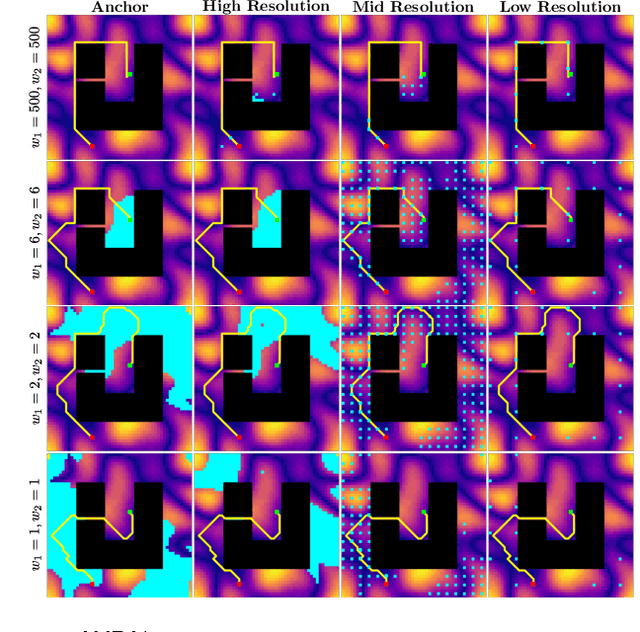
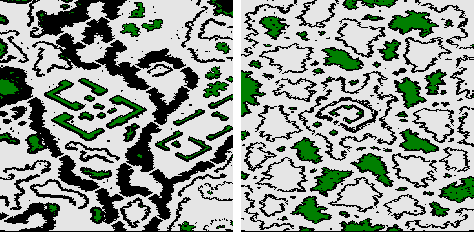
Heuristic search-based motion planning algorithms typically discretise the search space in order to solve the shortest path problem. Their performance is closely related to this discretisation. A fine discretisation allows for better approximations of the continuous search space, but makes the search for a solution more computationally costly. A coarser resolution might allow the algorithms to find solutions quickly at the expense of quality. For large state spaces, it can be beneficial to search for solutions across multiple resolutions even though defining the discretisations is challenging. The recently proposed algorithm Multi-Resolution A* (MRA*) searches over multiple resolutions. It traverses large areas of obstacle-free space and escapes local minima at a coarse resolution. It can also navigate so-called narrow passageways at a finer resolution. In this work, we develop AMRA*, an anytime version of MRA*. AMRA* tries to find a solution quickly using the coarse resolution as much as possible. It then refines the solution by relying on the fine resolution to discover better paths that may not have been available at the coarse resolution. In addition to being anytime, AMRA* can also leverage information sharing between multiple heuristics. We prove that AMRA* is complete and optimal (in-the-limit of time) with respect to the finest resolution. We show its performance on 2D grid navigation and 4D kinodynamic planning problems.
Improved Soft Duplicate Detection in Search-Based Motion Planning
Sep 25, 2021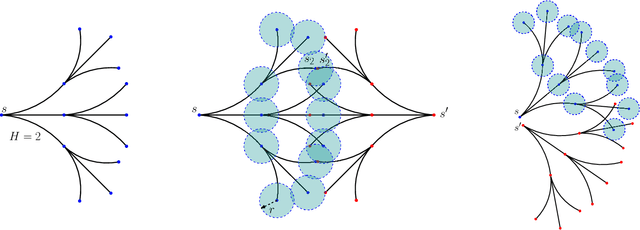
Search-based techniques have shown great success in motion planning problems such as robotic navigation by discretizing the state space and precomputing motion primitives. However in domains with complex dynamic constraints, constructing motion primitives in a discretized state space is non-trivial. This requires operating in continuous space which can be challenging for search-based planners as they can get stuck in local minima regions. Previous work on planning in continuous spaces introduced soft duplicate detection which requires search to compute the duplicity of a state with respect to previously seen states to avoid exploring states that are likely to be duplicates, especially in local minima regions. They propose a simple metric utilizing the euclidean distance between states, and proximity to obstacles to compute the duplicity. In this paper, we improve upon this metric by introducing a kinodynamically informed metric, subtree overlap, between two states as the similarity between their successors that can be reached within a fixed time horizon using kinodynamic motion primitives. This captures the intuition that, due to robot dynamics, duplicate states can be far in euclidean distance and result in very similar successor states, while non-duplicate states can be close and result in widely different successors.
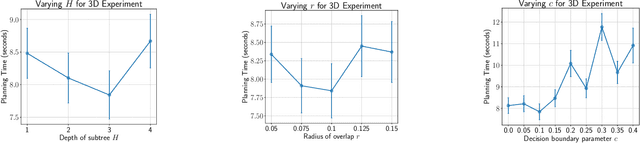
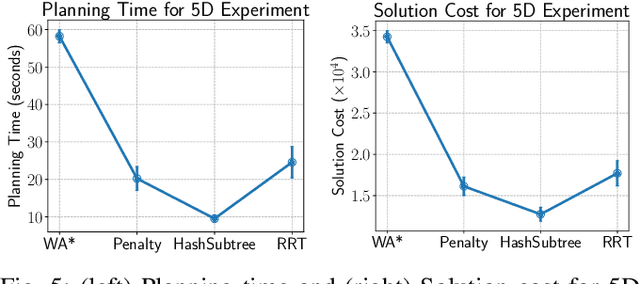
Search-based Path Planning for a High Dimensional Manipulator in Cluttered Environments Using Optimization-based Primitives
Jul 06, 2021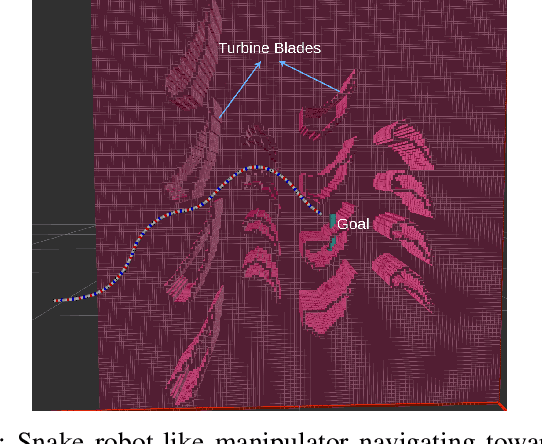
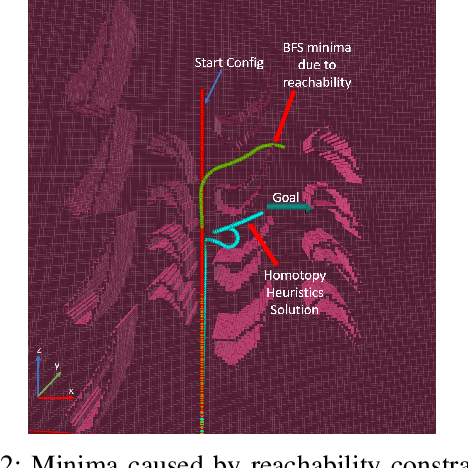
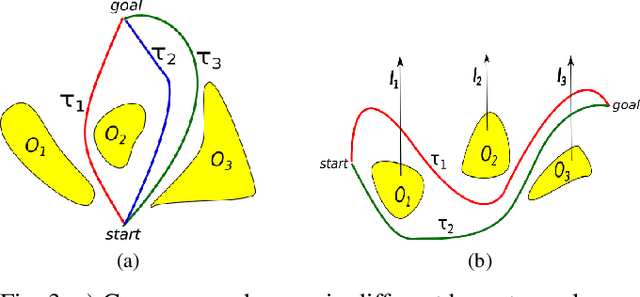
In this work we tackle the path planning problem for a 21-dimensional snake robot-like manipulator, navigating a cluttered gas turbine for the purposes of inspection. Heuristic search based approaches are effective planning strategies for common manipulation domains. However, their performance on high dimensional systems is heavily reliant on the effectiveness of the action space and the heuristics chosen. The complex nature of our system, reachability constraints, and highly cluttered turbine environment renders naive choices of action spaces and heuristics ineffective. To this extent we have developed i) a methodology for dynamically generating actions based on online optimization that help the robot navigate narrow spaces, ii) a technique for lazily generating these computationally expensive optimization actions to effectively utilize resources, and iii) heuristics that reason about the homotopy classes induced by the blades of the turbine in the robot workspace and a Multi-Heuristic framework which guides the search along the relevant classes. The impact of our contributions is presented through an experimental study in simulation, where the 21 DOF manipulator navigates towards regions of inspection within a turbine.
MPLP: Massively Parallelized Lazy Planning
Jul 06, 2021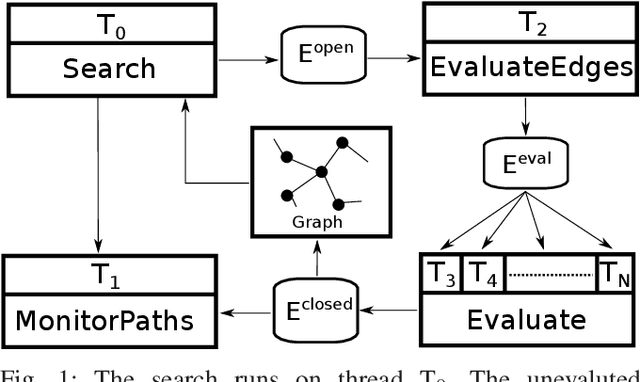
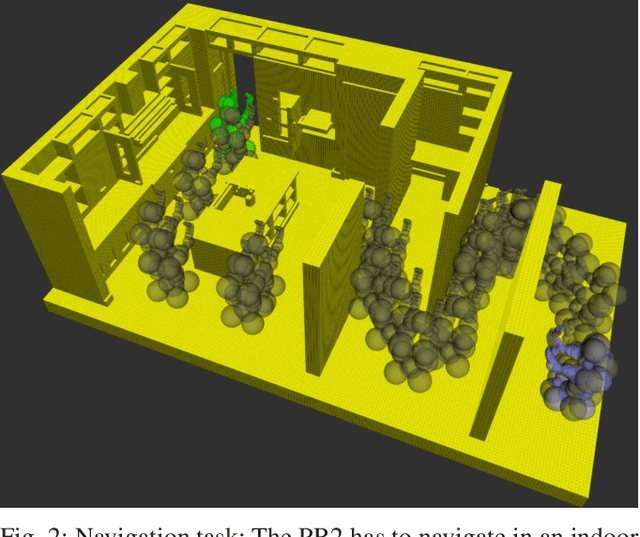
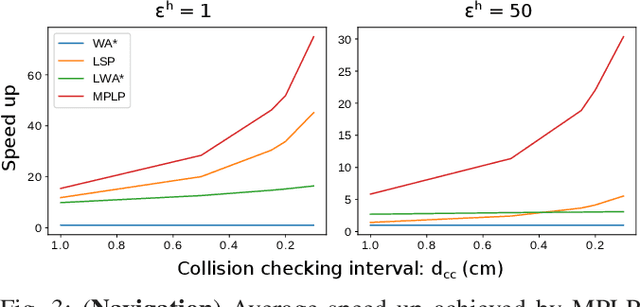
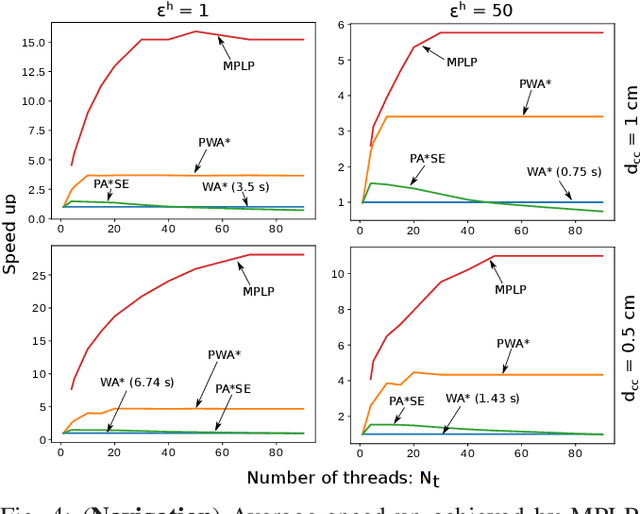
Lazy search algorithms have been developed to efficiently solve planning problems in domains where the computational effort is dominated by the cost of edge evaluation. The current approaches operate by intelligently balancing computational effort between searching the graph and evaluating edges. However these algorithms are designed to run as a single process and do not leverage the multi-threading capability of modern processors. In this work we propose a massively parallelized, bounded suboptimal, lazy search algorithm (MPLP) that harnesses modern multi-core processors. In MPLP, searching of the graph and edge evaluations are performed completely asynchronously in parallel, leading to a drastic improvement in planning time. We validate the proposed algorithm in two different planning domains: motion planning for a humanoid navigation and task and motion planning for a robotic assembly task. We show that MPLP outperforms the state of the art lazy search as well as parallel search algorithms.