 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeURDF+: An Enhanced URDF for Robots with Kinematic Loops
Nov 29, 2024



Designs incorporating kinematic loops are becoming increasingly prevalent in the robotics community. Despite the existence of dynamics algorithms to deal with the effects of such loops, many modern simulators rely on dynamics libraries that require robots to be represented as kinematic trees. This requirement is reflected in the de facto standard format for describing robots, the Universal Robot Description Format (URDF), which does not support kinematic loops resulting in closed chains. This paper introduces an enhanced URDF, termed URDF+, which addresses this key shortcoming of URDF while retaining the intuitive design philosophy and low barrier to entry that the robotics community values. The URDF+ keeps the elements used by URDF to describe open chains and incorporates new elements to encode loop joints. We also offer an accompanying parser that processes the system models coming from URDF+ so that they can be used with recursive rigid-body dynamics algorithms for closed-chain systems that group bodies into local, decoupled loops. This parsing process is fully automated, ensuring optimal grouping of constrained bodies without requiring manual specification from the user. We aim to advance the robotics community towards this elegant solution by developing efficient and easy-to-use software tools.
Probabilistic Homotopy Optimization for Dynamic Motion Planning
Aug 22, 2024We present a homotopic approach to solving challenging, optimization-based motion planning problems. The approach uses Homotopy Optimization, which, unlike standard continuation methods for solving homotopy problems, solves a sequence of constrained optimization problems rather than a sequence of nonlinear systems of equations. The insight behind our proposed algorithm is formulating the discovery of this sequence of optimization problems as a search problem in a multidimensional homotopy parameter space. Our proposed algorithm, the Probabilistic Homotopy Optimization algorithm, switches between solve and sample phases, using solutions to easy problems as initial guesses to more challenging problems. We analyze how our algorithm performs in the presence of common challenges to homotopy methods, such as bifurcation, folding, and disconnectedness of the homotopy solution manifold. Finally, we demonstrate its utility via a case study on two dynamic motion planning problems: the cart-pole and the MIT Humanoid.
Tailoring Solution Accuracy for Fast Whole-body Model Predictive Control of Legged Robots
Jul 15, 2024Thanks to recent advancements in accelerating non-linear model predictive control (NMPC), it is now feasible to deploy whole-body NMPC at real-time rates for humanoid robots. However, enforcing inequality constraints in real time for such high-dimensional systems remains challenging due to the need for additional iterations. This paper presents an implementation of whole-body NMPC for legged robots that provides low-accuracy solutions to NMPC with general equality and inequality constraints. Instead of aiming for highly accurate optimal solutions, we leverage the alternating direction method of multipliers to rapidly provide low-accuracy solutions to quadratic programming subproblems. Our extensive simulation results indicate that real robots often cannot benefit from highly accurate solutions due to dynamics discretization errors, inertial modeling errors and delays. We incorporate control barrier functions (CBFs) at the initial timestep of the NMPC for the self-collision constraints, resulting in up to a 26-fold reduction in the number of self-collisions without adding computational burden. The controller is reliably deployed on hardware at 90 Hz for a problem involving 32 timesteps, 2004 variables, and 3768 constraints. The NMPC delivers sufficiently accurate solutions, enabling the MIT Humanoid to plan complex crossed-leg and arm motions that enhance stability when walking and recovering from significant disturbances.
Recursive Rigid-Body Dynamics Algorithms for Systems with Kinematic Loops
Nov 22, 2023



We propose a novel approach for generalizing the following rigid-body dynamics algorithms: Recursive Newton-Euler Algorithm, Articulated-Body Algorithm, and Extended-Force-Propagator Algorithm. The classic versions of these recursive algorithms require systems to have an open chain structure. Dealing with closed-chains has, conventionally, required different algorithms. In this paper, we demonstrate that the classic recursive algorithms can be modified to work for closed-chain mechanisms. The critical insight of our generalized algorithms is the clustering of bodies involved in local loop constraints. Clustering bodies enables loop constraints to be resolved locally, i.e., only when that group of bodies is encountered during a forward or backward pass. This local treatment avoids the need for large-scale matrix factorization. We provide self-contained derivations of the algorithms using familiar, physically meaningful concepts. Overall, our approach provides a foundation for simulating robotic systems with traditionally difficult-to-simulate designs, such as geared motors, differential drives, and four-bar mechanisms. The performance of our library of algorithms is validated numerically in C++ on various modern legged robots: the MIT Mini Cheetah, the MIT Humanoid, the UIUC Tello Humanoid, and a modified version of the JVRC-1 Humanoid. Our algorithms are shown to outperform state-of-the-art algorithms for computing constrained rigid-body dynamics.
Reinforcement Learning for Legged Robots: Motion Imitation from Model-Based Optimal Control
May 18, 2023



We propose MIMOC: Motion Imitation from Model-Based Optimal Control. MIMOC is a Reinforcement Learning (RL) controller that learns agile locomotion by imitating reference trajectories from model-based optimal control. MIMOC mitigates challenges faced by other motion imitation RL approaches because the references are dynamically consistent, require no motion retargeting, and include torque references. Hence, MIMOC does not require fine-tuning. MIMOC is also less sensitive to modeling and state estimation inaccuracies than model-based controllers. We validate MIMOC on the Mini-Cheetah in outdoor environments over a wide variety of challenging terrain, and on the MIT Humanoid in simulation. We show cases where MIMOC outperforms model-based optimal controllers, and show that imitating torque references improves the policy's performance.
Dynamic Walking with Footstep Adaptation on the MIT Humanoid via Linear Model Predictive Control
Jun 08, 2022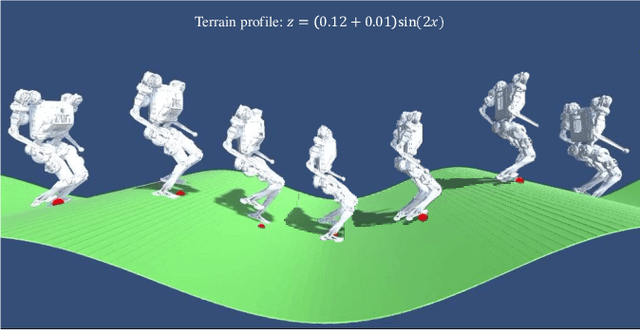
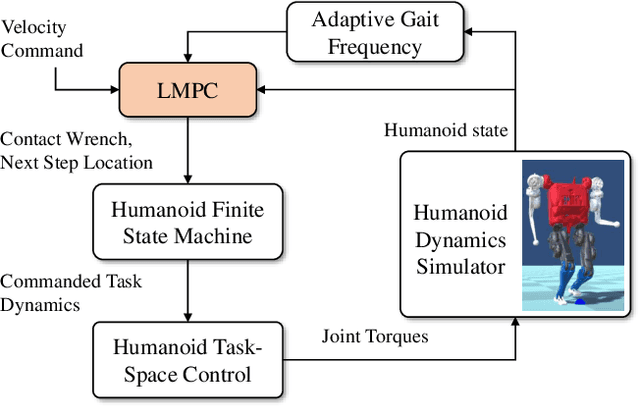
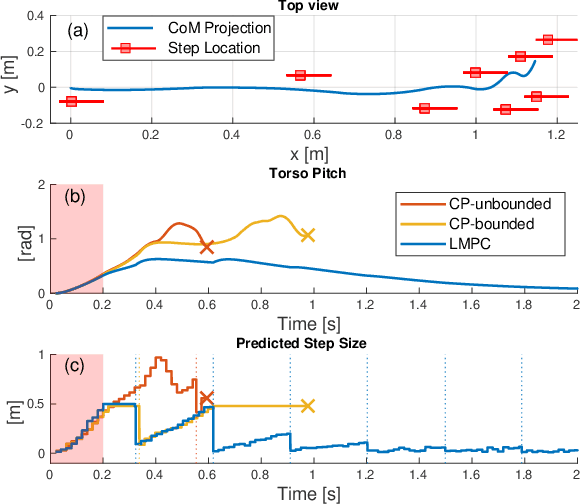
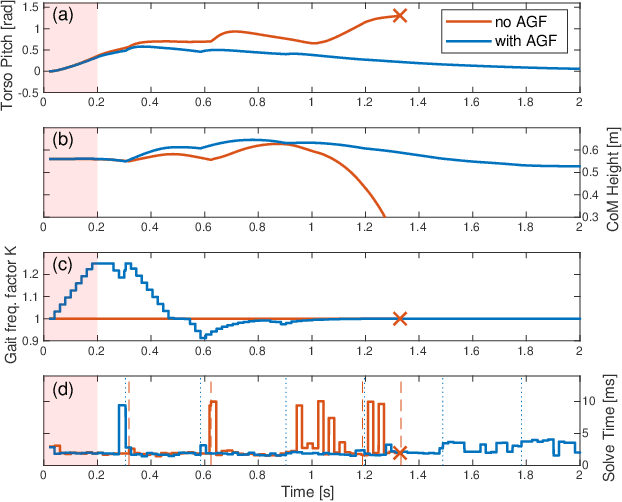
This paper proposes a model predictive control (MPC) framework for realizing dynamic walking gaits on the MIT Humanoid. In addition to adapting footstep location and timing online, the proposed method can reason about varying height, contact wrench, torso rotation, kinematic limit and negotiating uneven terrains. Specifically, a linear MPC (LMPC) optimizes for the desired footstep location by linearizing the single rigid body dynamics with respect to the current footstep location. A low-level task-space controller tracks the predicted state and control trajectories from the LMPC to leverage the full-body dynamics. Finally, an adaptive gait frequency scheme is employed to modify the step frequency and enhance the robustness of the walking controller. Both LMPC and task-space control can be efficiently solved as quadratic programs (QP), and thus amenable for real-time applications. Simulation studies where the MIT Humanoid traverses a wave field and recovers from impulsive disturbances validated the proposed approach.
Rapid and Reliable Trajectory Planning Involving Omnidirectional Jumping of Quadruped Robots
Nov 26, 2021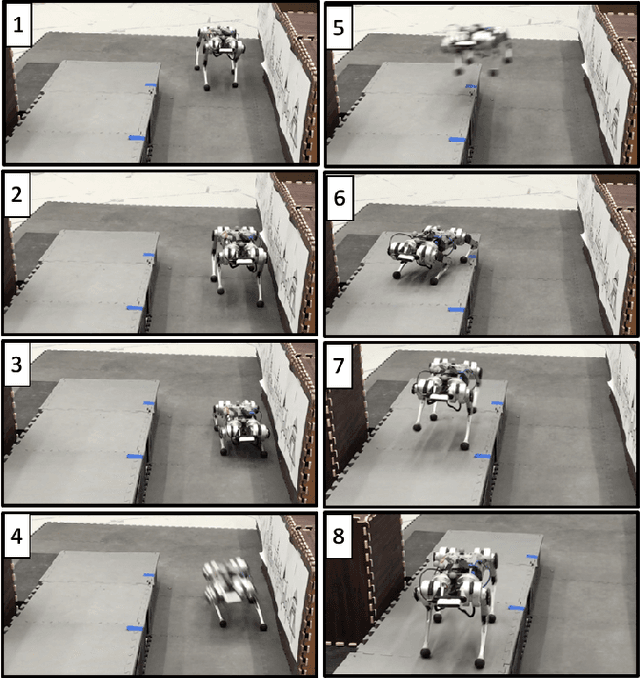

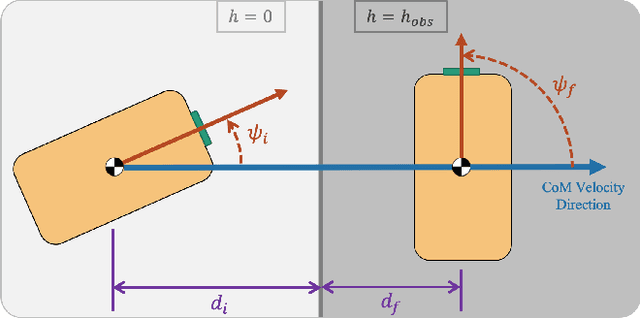
Dynamic jumping with multi-legged robots poses a challenging problem in planning and control. Formulating the jump optimization to allow fast online execution is difficult; efficiently using this capability to generate long-horizon trajectories further complicates the problem. In this work, we present a novel hierarchical planning framework to address this problem. We first formulate a real-time tractable trajectory optimization for performing omnidirectional jumping. We then embed the results of this optimization into a low dimensional jump feasibility classifier. This classifier is leveraged by a high-level planner to produce paths that are both dynamically feasible and also robust to variability in hardware trajectory realizations. We deploy our framework on the Mini Cheetah Vision quadruped, demonstrating robot's ability to generate and execute reliable, goal-oriented paths that involve forward, lateral, and rotational jumps onto surfaces 1.35 times taller than robot's nominal hip height. The ability to plan through omnidirectional jumping greatly expands robot's mobility relative to planners that restrict jumping to the sagittal or frontal planes.
Online Trajectory Optimization for Dynamic Aerial Motions of a Quadruped Robot
Oct 12, 2021



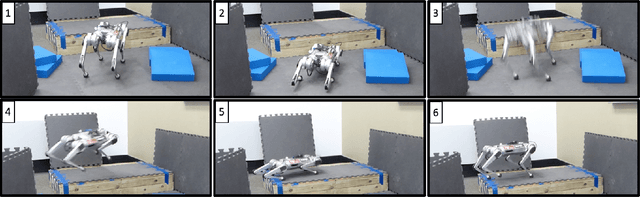
This work presents a two part framework for online planning and execution of dynamic aerial motions on a quadruped robot. Motions are planned via a centroidal momentum-based nonlinear optimization that is general enough to produce rich sets of novel dynamic motions based solely on the user-specified contact schedule and desired launch velocity of the robot. Since this nonlinear optimization is not tractable for real-time receding horizon control, motions are planned once via nonlinear optimization in preparation of an aerial motion and then tracked continuously using a variational-based optimal controller that offers robustness to the uncertainties that exist in the real hardware such as modeling error or disturbances. Motion planning typically takes between 0.05-0.15 seconds, while the optimal controller finds stabilizing feedback inputs at 500 Hz. Experimental results on the MIT Mini Cheetah demonstrate that the framework can reliably produce successful aerial motions such as jumps onto and off of platforms, spins, flips, barrel rolls, and running jumps over obstacles.
The MIT Humanoid Robot: Design, Motion Planning, and Control For Acrobatic Behaviors
Apr 19, 2021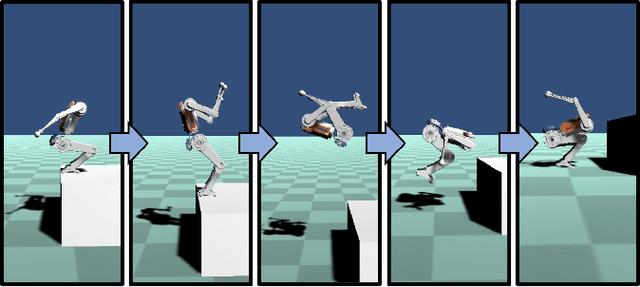
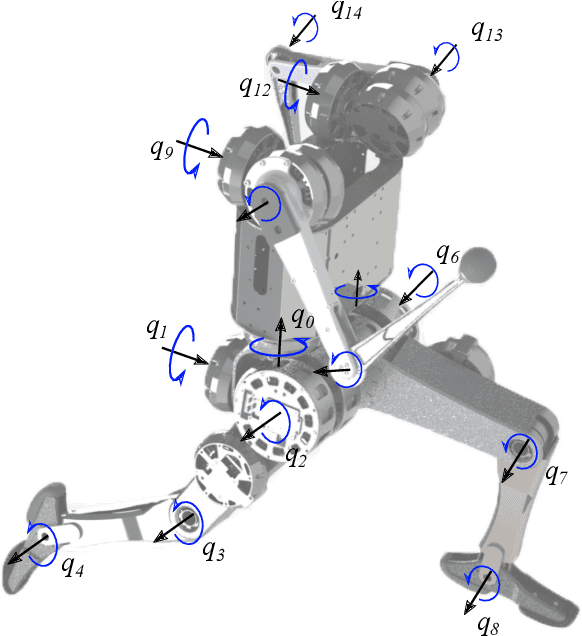
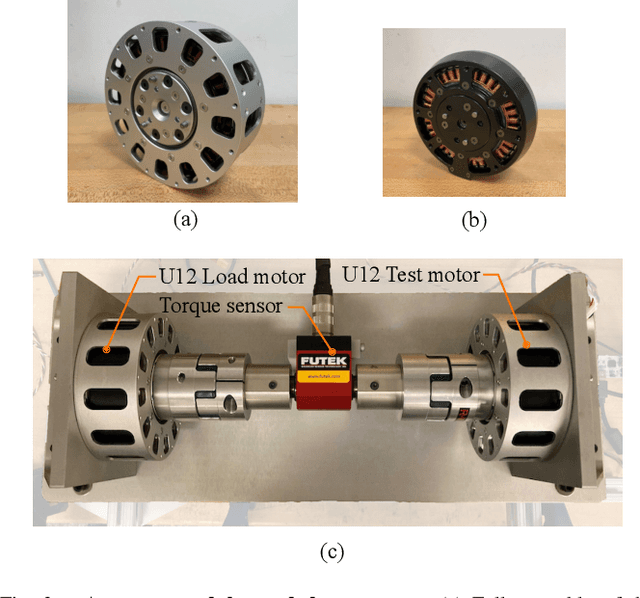
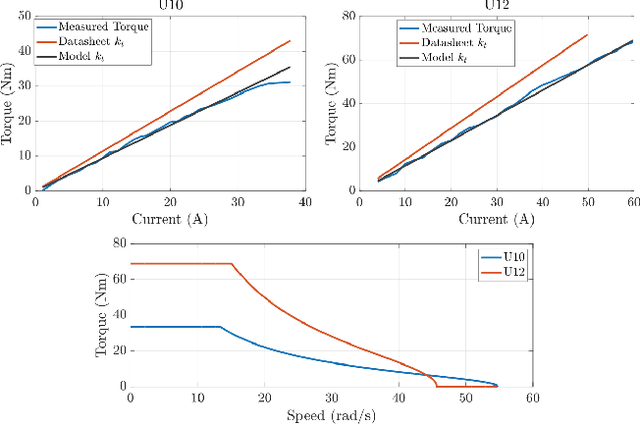
Demonstrating acrobatic behavior of a humanoid robot such as flips and spinning jumps requires systematic approaches across hardware design, motion planning, and control. In this paper, we present a new humanoid robot design, an actuator-aware kino-dynamic motion planner, and a landing controller as part of a practical system design for highly dynamic motion control of the humanoid robot. To achieve the impulsive motions, we develop two new proprioceptive actuators and experimentally evaluate their performance using our custom-designed dynamometer. The actuator's torque, velocity, and power limits are reflected in our kino-dynamic motion planner by approximating the configuration-dependent reaction force limits and in our dynamics simulator by including actuator dynamics along with the robot's full-body dynamics. For the landing control, we effectively integrate model-predictive control and whole-body impulse control by connecting them in a dynamically consistent way to accomplish both the long-time horizon optimal control and high-bandwidth full-body dynamics-based feedback. Actuators' torque output over the entire motion are validated based on the velocity-torque model including battery voltage droop and back-EMF voltage. With the carefully designed hardware and control framework, we successfully demonstrate dynamic behaviors such as back flips, front flips, and spinning jumps in our realistic dynamics simulation.